
Klasyczny puzzle opisałem tutaj
Nieco dokładniej opiszę proces budowy Puzzla pro.
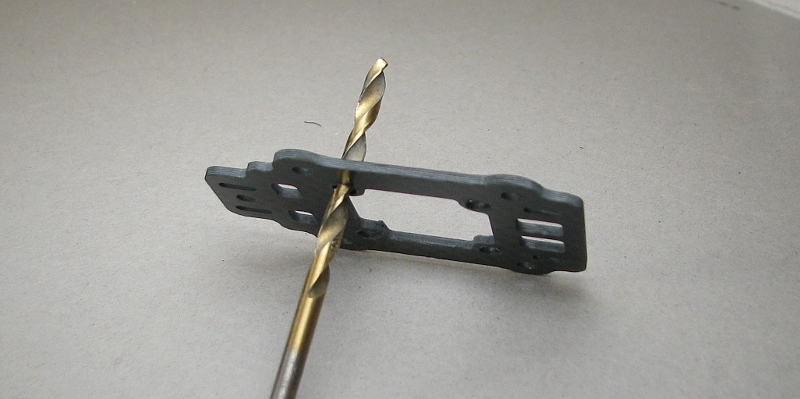
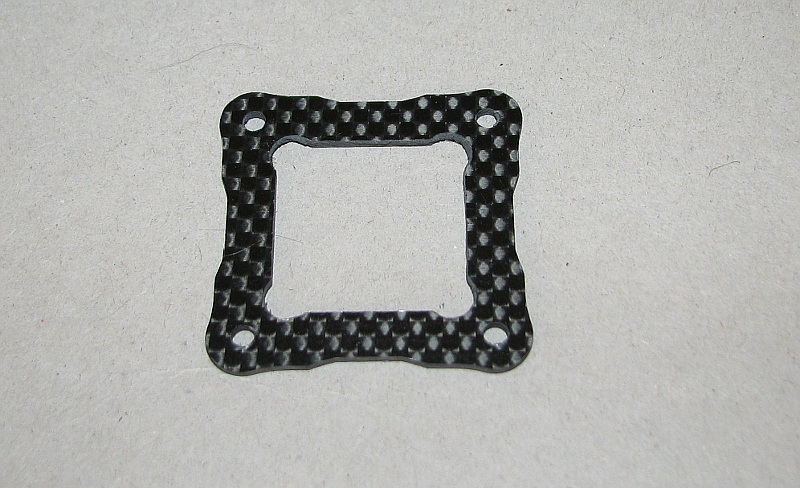
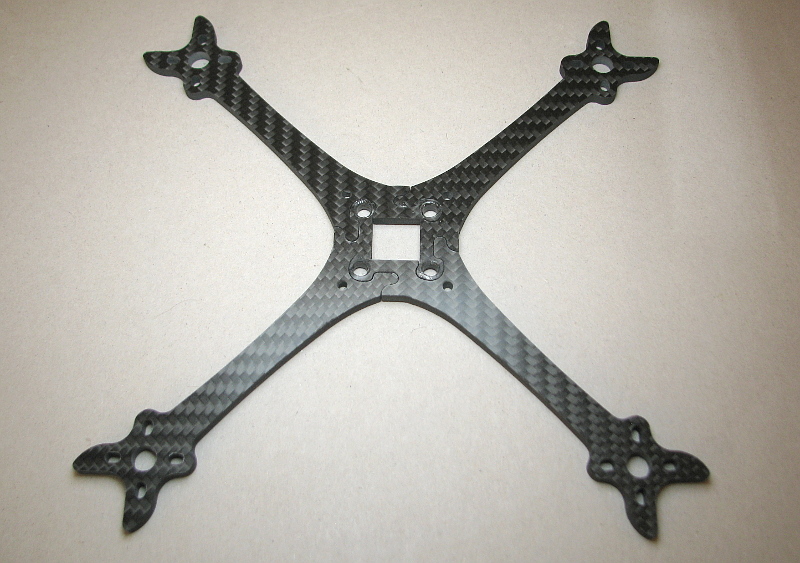
Zaczniemy od center plate. Ma on standardowo otwory na śruby 3mm tak jak każda rama. Natomiast ja użyję stacka HGLRC XJB F440 który jest dostosowany do śrub 2mm. Dodatkowo stack tem ma sztywne złącze między FC a ESC więc nie pozwala to na softmount. Ale doszedłem że zamiast na FC , dampery możemy zamontować na center plate. Jako że nie znalazłem damperów na sruby 2mm użyłem rurki tygonowej. Aby ją wcisnąć w otwór trzeba go rozwiercić do 3,5mm.
Rurkę przeciągamy aby z jednej strony został 1mm, z drugiej obcinamy aby tez został 1mm. Powtarzamy to dla wszystkich 4 otworów.
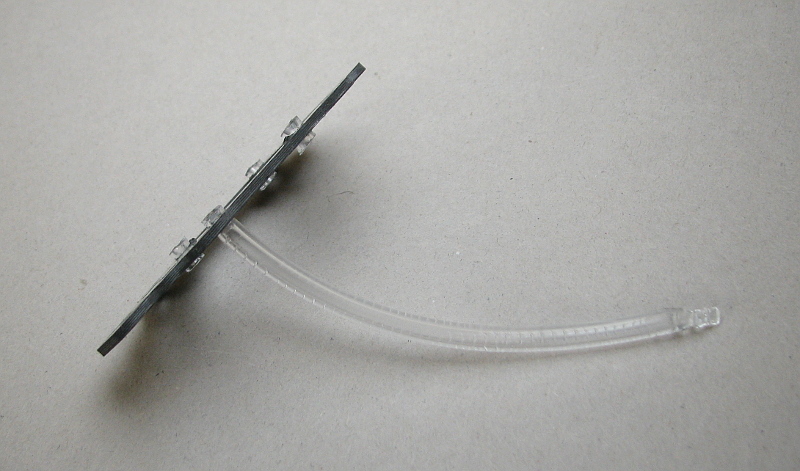
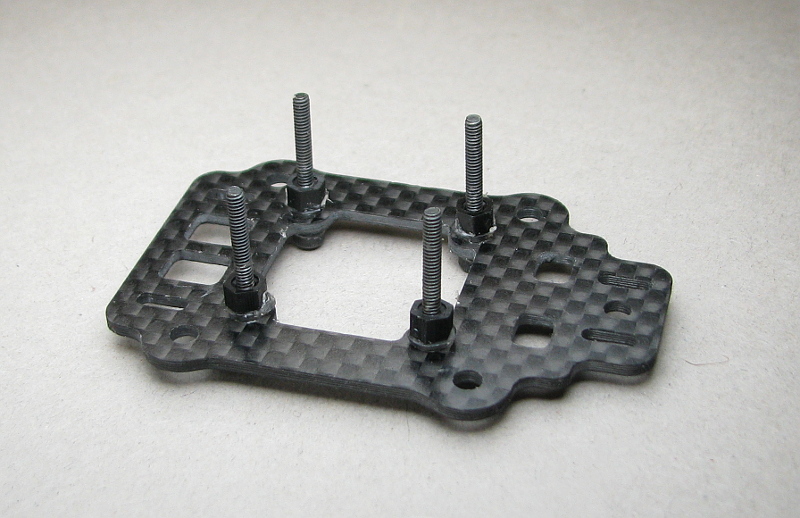
Przekładamy przez rurki śmruby M2 i nakręcamy dystans nylonowy. Z powodu że mamy mało miejsca należy dystanse skrócić o połowę, co powinno dać 3mm plus 1mm rurki. Jest to wystarczający odstęp aby tędy przeszedł rzep. Po lekkim skręceniu rurka się rozszerza na końcach co zapobiega jej przesuwaniu. Z powodu że nie przykręcamy dystansów mocno aby się nie kręciły użyłem nie za mocnego kleju.
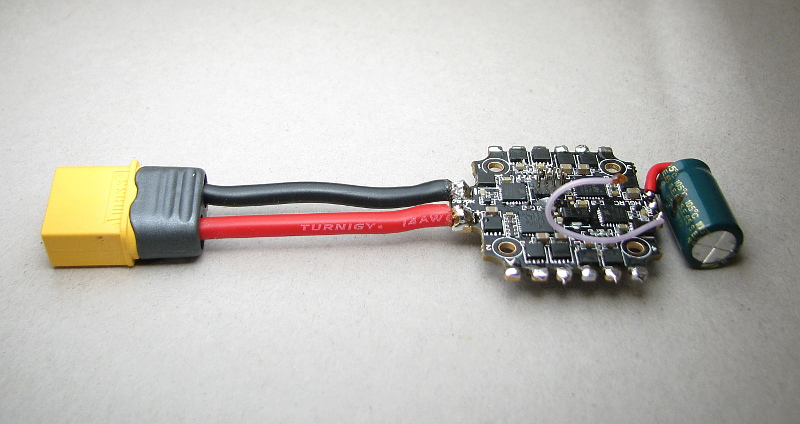
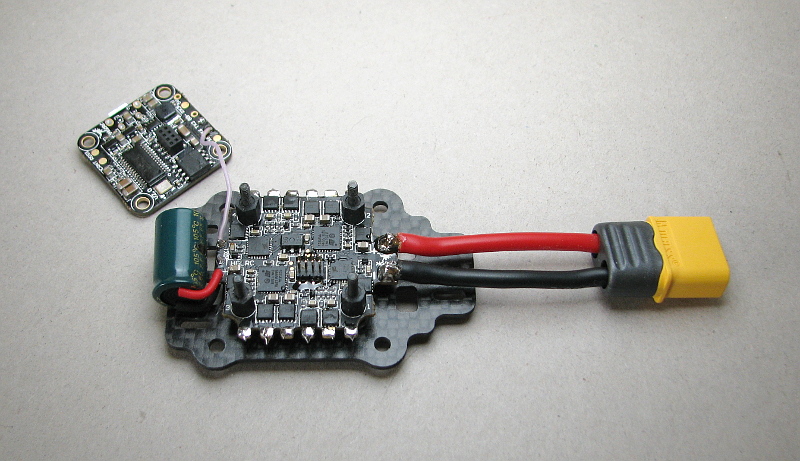
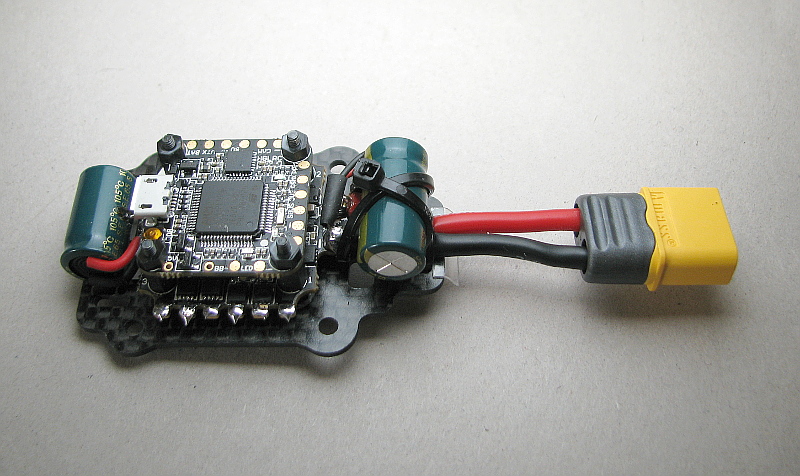
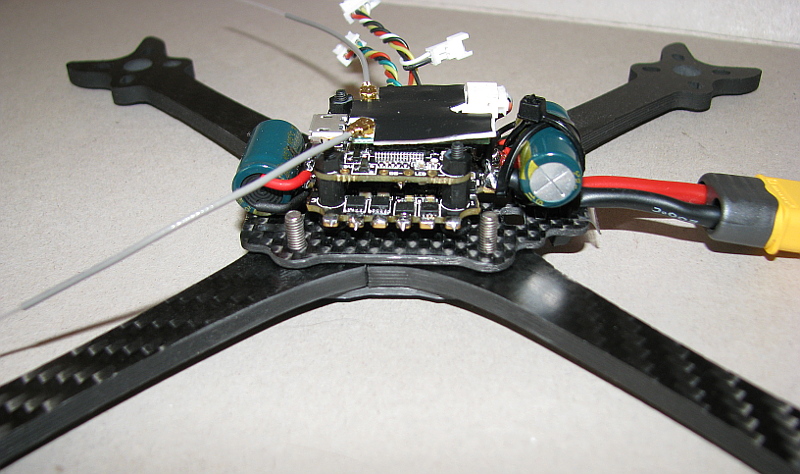
Następny krok to przygotowanie ESC. Póki jest nie jest zamontowany najłatwiej go pocynować oraz przylutować przewody oraz przedni kondensator. Kondensator z zestawu jest nieco za długi aby się zmieścił pomiędzy przednimi pionowymi płytami CF dlatego musiałem użyć innego. Zabezpieczyłem też ESC i FC PVB. Zawsze to minimalizuje ryzyko uszkodzenia jak trawa jest mokra lub czasami potrafi pokropić.
ESC przykręcamy już mocno. Przylutowałem też przewód telemetrii z ESC do FC.
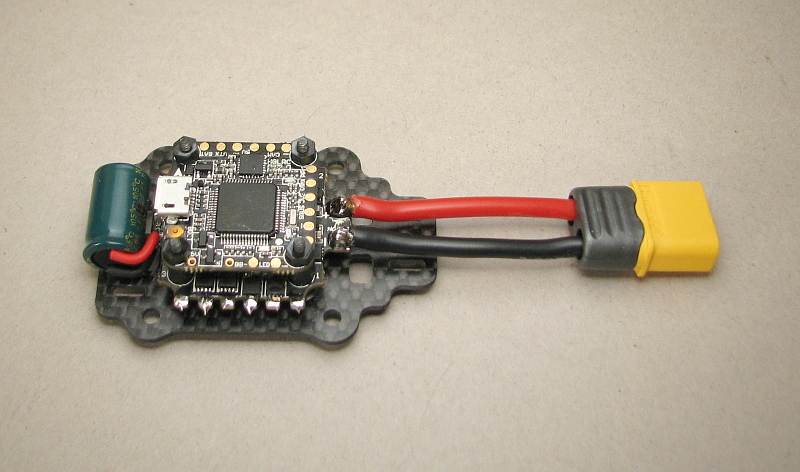
Przykręcamy FC i stack jest gotowy. Po wcześniejszym przecięciu dolnych dystansów też zostają grubsze nakrętki które lepiej trzymają FC.
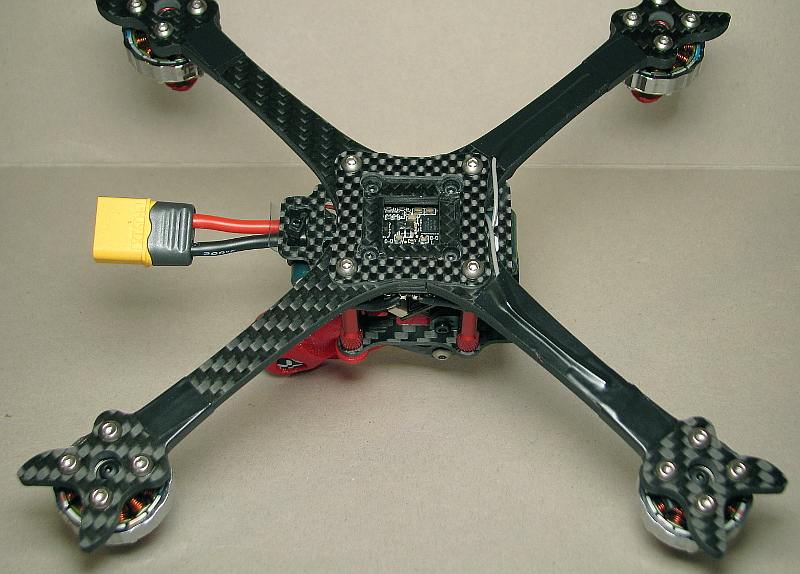
Od dołu. Jako że lubię przewidywać jakie nieszczęścia moga się trafić postanowiłem kable od baterii przytrytkować do ramy. Aby nie doszło do zwarcia gdyby silikon od kabli się przeciął dociąłem przekładkę z butelki PET
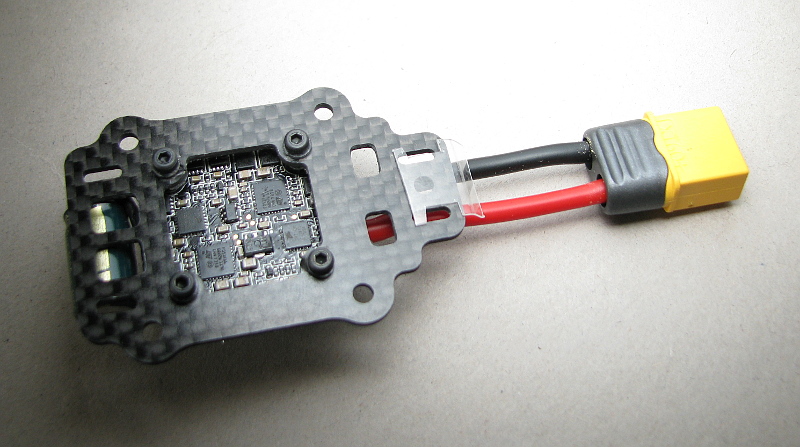
Przytrytkowany kabel od baterii.
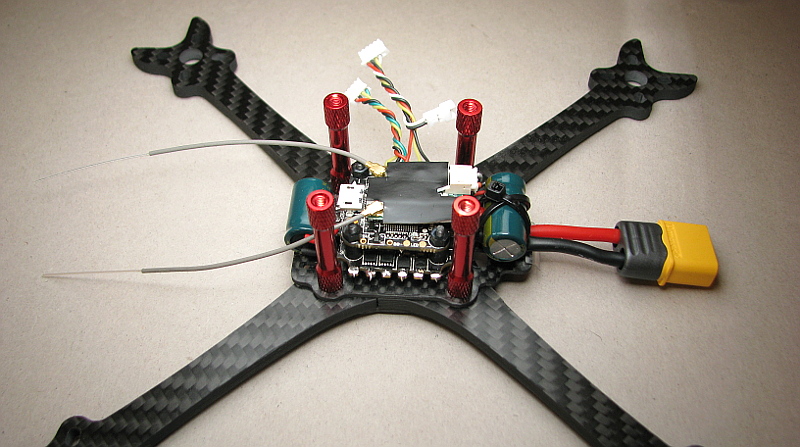
Przylutowałem też drugi kondensator który jest w zestawie z XJB F440. W sumie jest 2000uF. Czemu tak dużo ? Ano płytka 20x20 pomieścił ledwo mosfety, niestety jest znikoma ilość kondensatorów ceramicznych które licznie występują na ESC 30x30mm. Dlatego wolałem mieć więcej uF niż za mało.
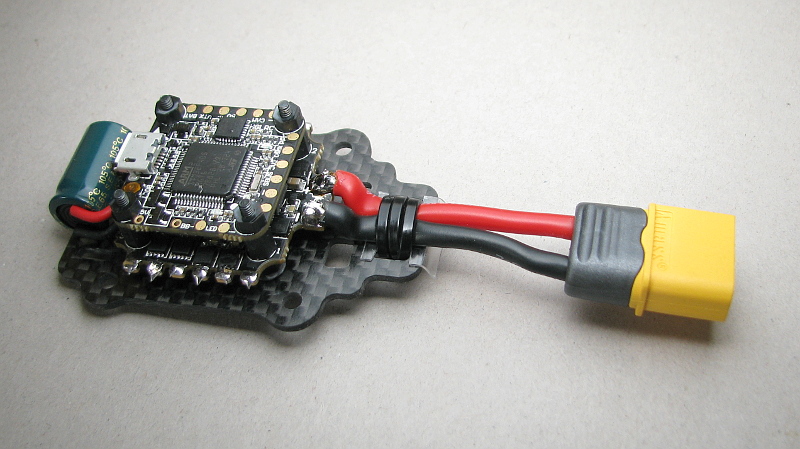
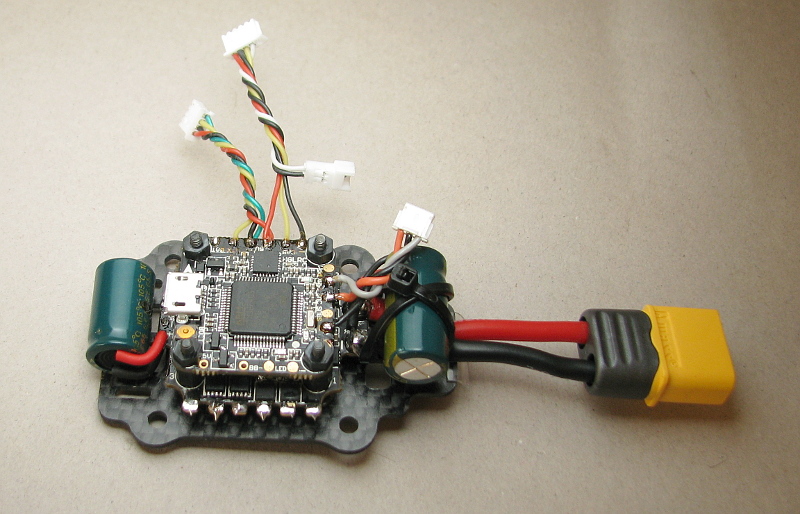
Następnie przylutowałem przewody z wtyczkami do kamey, VTX oraz RX.
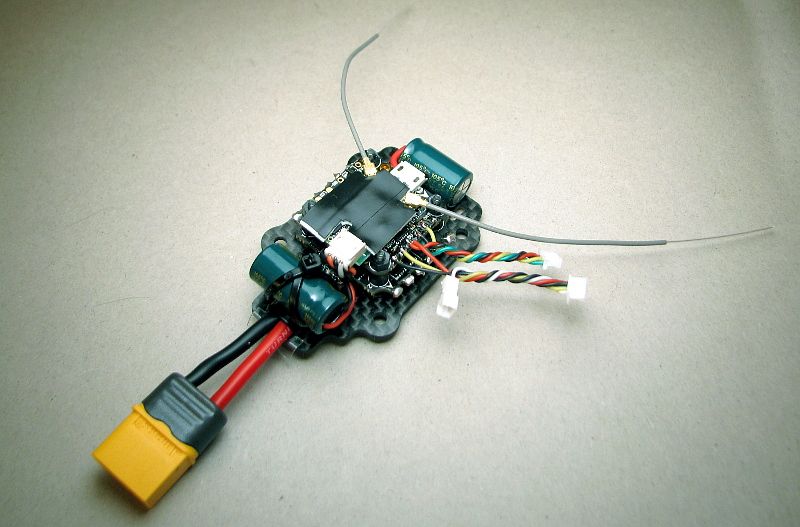
Odbiornik, w tym przypadku satelitkę SPM4648 wyjąłem z obudowy i przykleiłem za pomocą pianki do procesora. Warto plastikową obudować procesora przemyć IPA bo pianki się słabo trzymają PVB. Od góry odbiornik zabezpieczyłem też pianką z taśmą izolacyjną aby chronić jej elementy.
Bottom plate na dół
Ramiona w środek.
Na górę nasz stack zbudowany na centerplate. i Śruby tytanowe m3x14mm
Skręcamy słupkami 30mm
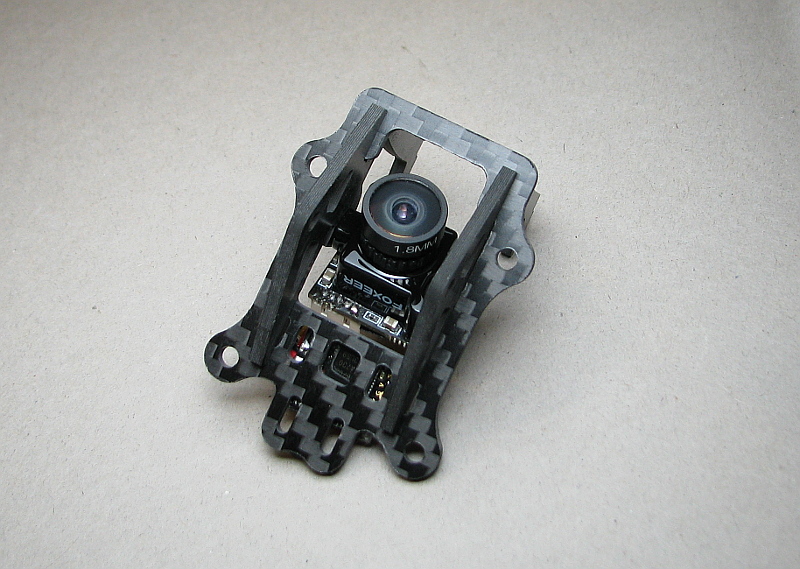
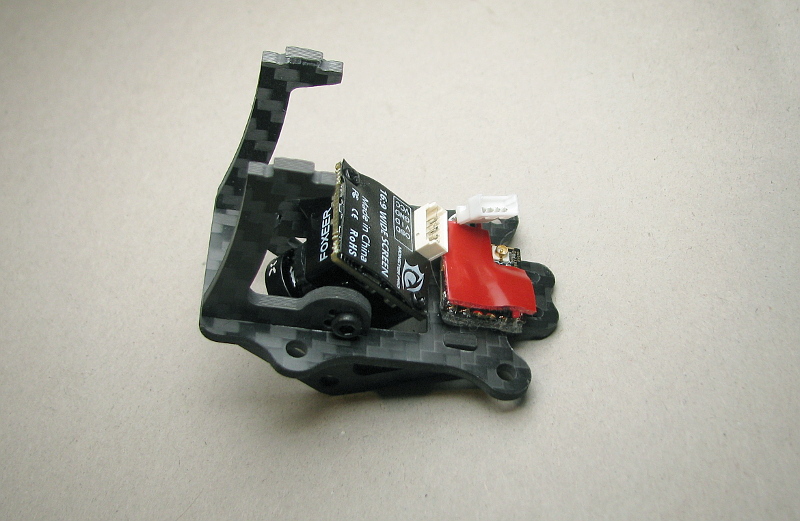
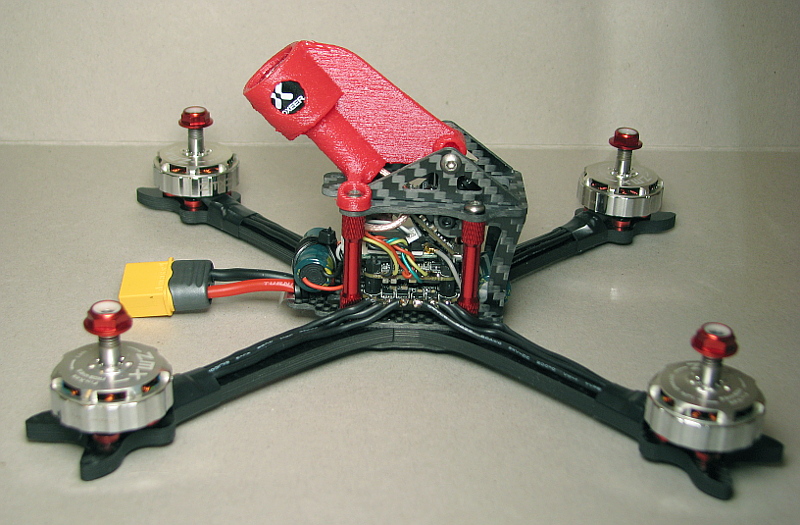
Kamerka Foxeer Predator Micro przykręcona do pionowych plejtów.
Od spodu top plate przyklejony żelką TBS Unify Nano, wydaje mi się że żelka lepiej przewodzi ciepło niż panka. No i jak pianka lekko zabezpiecza przed uszkodzeniami.
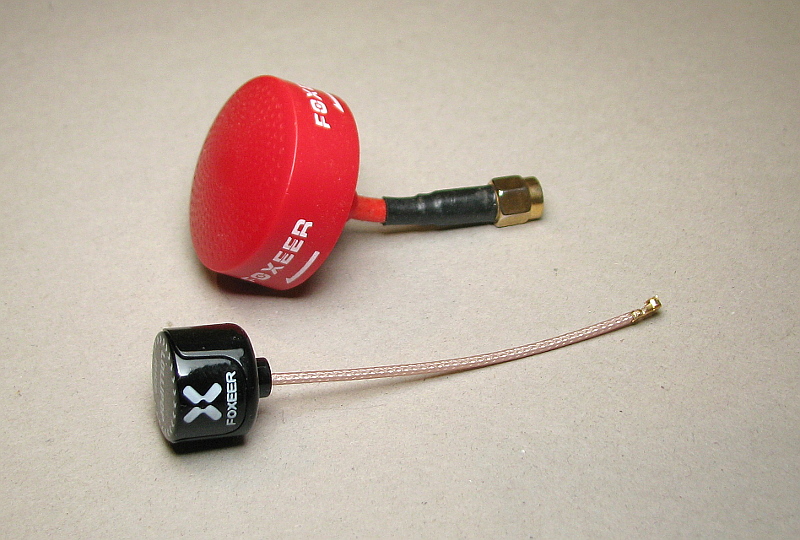
Zdecydowanie lepiej się lata na antenie z polaryzacją kołową niż liniową typu bacik czy vee. Jest mniej trzasków i nie ma martwych pozycji. Antena której użyłem to Foxeer Lollipop 5,8GHz Antenna. Jest dużo mniejsza i lżejsza od klasycznej koniczyny, czy pagody a praktycznie nie ustępuję jakości nadawania.
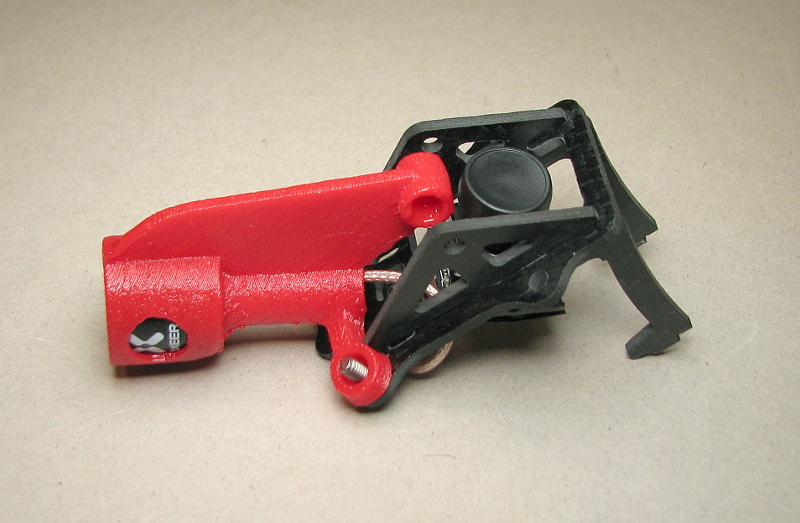
Aby się nie dyndała, i nie obrywała z liścia i długo służyła wydrukowałem do niej mocowanie z TPU. Płetwa ma usztyniać mocowanie i podnosić wysokość. Dzięki temu łatwiej odwrócić się z pleców po upadku.

Przymiarka do top plate.
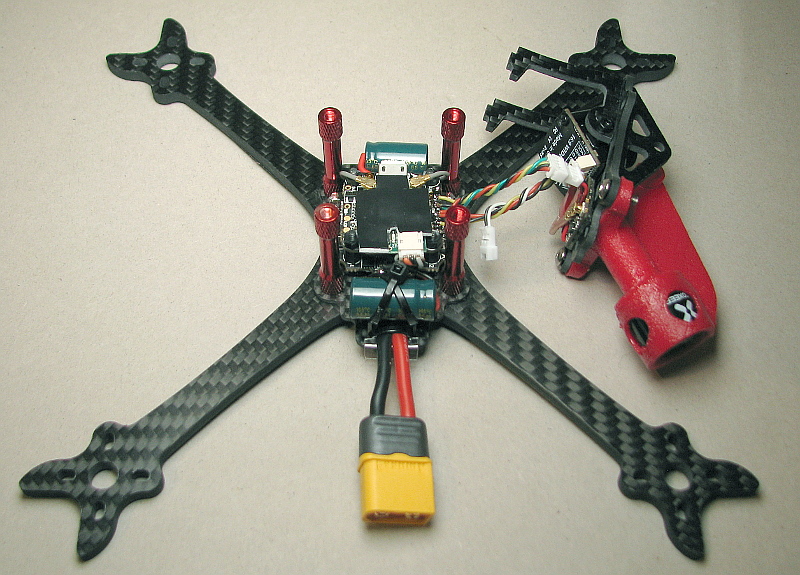
Przyszedł czas na przetestowania tego zlepka elektroniki. Zbindowanie odbiornika, skonfigurowanie FC, sprawdzenie kamery i VTX.
I tu ZONK, bo akurat quad jest dla kolegi, ja mam futabę a on spektrum. Ale walała mi się budżetowa aparatura DXe. Aparatura zasadniczo plasticzana. Żadnego wyświetlacza ale postanowiłem zaryzykować.
Gimbale w tej aparaturze pracują całkiem przyjemnie, nawet chyba lepiej niż w pierwszej generacji DX6. Satelitka zbindowała się poprawnie, kolejność kanałów się zgadza więc nie było problemu z softem Betaflight. Problem wyskoczył z powodu rewersy na YAW i ROLL a tu żadnego switcha jak w innych tanich apkach. Ale YT szybko pokazał jak drążkologicznie zmienić rewersy. Nie wiem czy da się w niej zmienić limity ale nie jest to niezbędne wiec się w to nie zagłębiałem

Nie było żadnych problemów więc wszystko skręciłem do kupy. Ze względu na mocowanie lolipopa użyłem śrub M3x8, oczywiście też tytanowych nieco cięższych od gównoaluminowych które potem stwarzają problemy. Poprzeczny dystans zamontowany na m3x6mm.



Przyszedł czas na zamontowanie silników. Wybór to bardzo lekkie i mocne silniki ZMX Finx23 2600kv. Silniki mają rozmiar statora 22x5.5mm, a dzięki sporej ilości nowoczesnych rozwiązań silniki te przewyższają mocą i momentem obrotowym silniki 2206.


Po zamontowaniu. Oczywiści przed przycięciem kabli sprawdziłem kierunki obrotów bo nie lubię włączać rewersy w Blheli. I tu dosyć fajnie się składa bo przylutowanie kabli w takiej kolejności jak wychodzą z silnika daje prawidłowy kierunek obrotów.


Od spodu, widać tu antenki satelitki poprowadzone wzdłuż przednich ramion.
I to praktycznie koniec. Ostatecznie dołożyłem osłonki przewodów silnikowych z butelki PET i założyłem śmigła.
iiiiiiiii ... na wagę.
230g. Ogólnie wyszło tak jak się spodziewałem, o 10g więcej niż poprzedni puzzle ze względu na zastąpienie bacika lolipopem z mocowaniem TPU.

Od spodu jest pianka która chroni pakiet przed śrubami i sprawia że pakiet się mniej ślizga.

Ostatecznie puzzle z pakietem.

Poniżej foty by @Auirburner innego puzzla pro.



