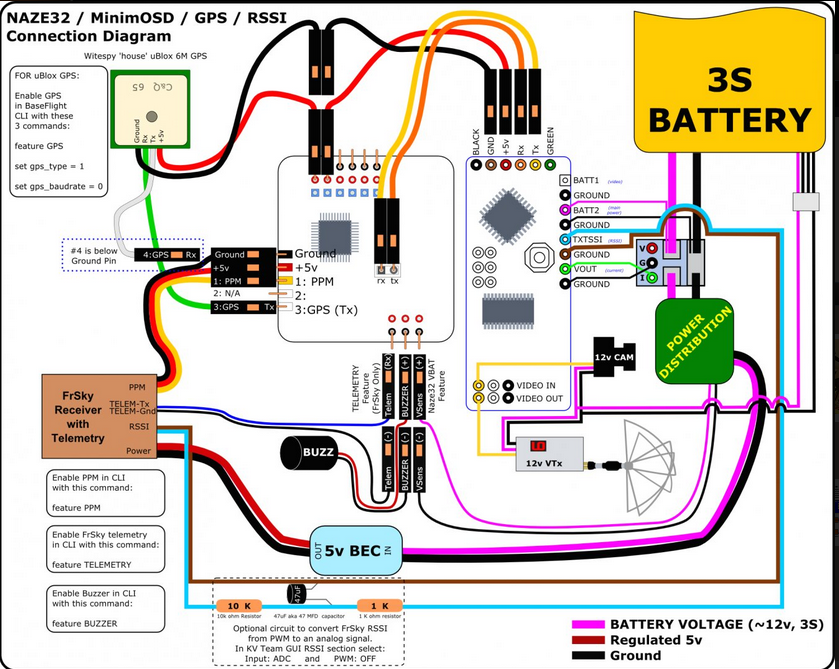
Używam nadajnika bez telemetrii więc RSSI trochę mi brakowało, do tego podglądem napięcia na pakiecie też bym nie wzgardził i męczące było targanie laptopa na pole żeby ustawiać PIDy w Naze32, więc trzeba było coś ugotować z przepisu jak poniżej (może się komuś przyda):
1.
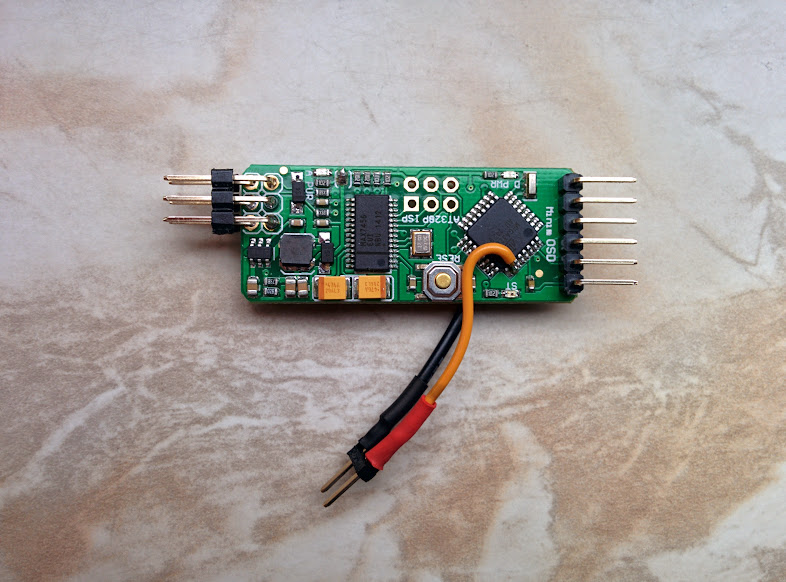
MinimOSD z banggood,
2. FTDI z allegro, tu było trochę na ten temat:
viewtopic.php?f=68&t=1892&start=30ZasilanieMinimOSD jest podzielony na dwie sekcje (D - digital - cyfrowa, A - analogowa) , które można zasilić z:
- jednego napięcia 5V,
- lub jedna sekcja z 5V, a druga 12V - z toru video np.
Domyślnie MiminOSD przychodzi w tej drugiej konfiguracji, co niestety u mnie nie działało zbyt dobrze, a dokładniej miałem:
- zwiechy MinimOSD na starcie jak układ był nierozgrzany

,
- odcięcia całkowite video po uruchomieniu silników

.
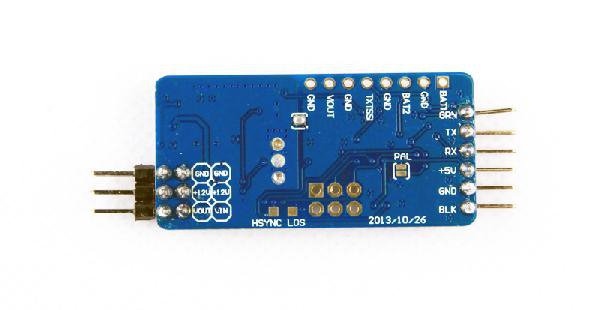
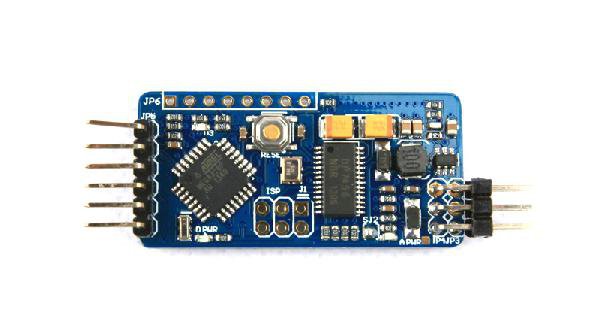
Trzeba było więc spróbować zasilania tylko z 5V. W tym celu trzeba zlutować dwie zworki na płytce, po jednej z każdej strony:

i odłączyć zasilanie z toru video:

co załatwiło oba powyższe problemy, gdzie 5V pociągnięte z Naze32 (zasilane z BECa):
 KV OSD
KV OSDDodatkowo wymieniłem jeszcze soft w MinimOSD (w sumie to nawet nie zanotowałem co tam banggood preinstaluje) na KV OSD:
https://code.google.com/p/rush-osd-development/do czego trzeba było:
1. Zainstalować Arduino IDE:
http://arduino.cc/en/Main/Software2. Ściągnąć KV_OSD:
KV_Team_OSD_2.3.zip i
EEPROM_Clear.zip,
3. Następnie podłączamy MinimOSD przez FTDI,
4. Kliknięcie na EEPROM_Clear.ino rozpakowanego powyżej, powinno otworzy Arduino IDE,
5. Tam upewniamy się, że w "Narzędzia" -> "Płytka" wybrane jest "Arduino Pro Mini (5V, 16MHz) w/ Atmega328" i port szeregowy odpowiadający naszemu FTDI,
6. Naciskamy Ctrl+U - następuje kompilacja i wrzucenie na MinimOSD programu czyszczącego EEPROM,
7. Zamykamy Arduino OSD i klikamy tym razem na 'KV_Team_OSD.ino' i powtarzamy czynności 4-6, co skompiluje tym razem firmware KV OSD i wrzuci na MinimOSD.
8. Następnie odpalamy "KV_Team_GUI" i wybieramy port COM z FTDI,
9. Klikamy w sekcji "FONT TOOLS" -> "Browse" i wybieramy plik fontów (ja wybrałem Big) i następnie "Upload".
FASST + RSSI out = 
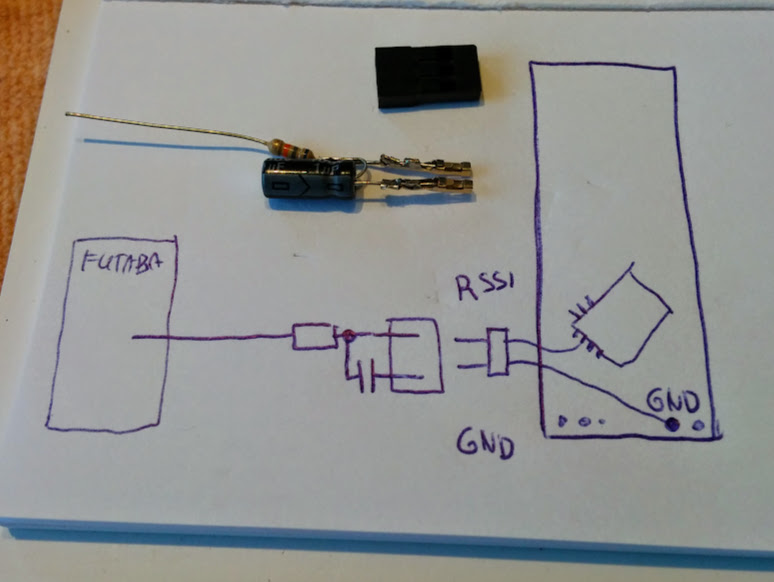
Jako linku RC używam futaby w wersji bez telemetrii (FASST & 8FG) i w dodatku odbiornik nie ma wyjścia RSSI, ale wygrzebałem sposób na adaptacje mrugającej diody na odbiorniku w sytuacji zagubienia ramki z nadajnika:
http://rcexplorer.se/diy/2011/01/lost-packet-indicator/Potrzebny były więc:
- rezystor: 68K Ohm,
- kondensator: 10uF
Co po połączeniu z wtyczką od serwa dało taki twór:
a po wpięciu w diodę na odbiorniku i ubraniu w termokurcze:
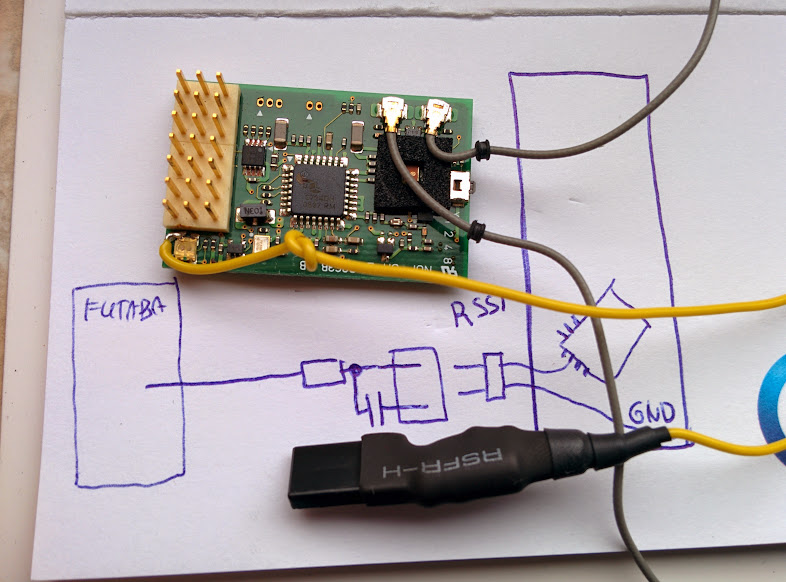
Po stronie MinimOSD trzeba było jeszcze podpiąć się pod jedną z nóżek procesora:
i GND:

W "KV Team GUI" w zakładce "RSSI SETTINGS" trzeba wybrać "ADC" (czyli OSD będzie szukało sygnału RSSI na nóżce analogowej procka, a nie z Naze32) oraz ustawić "RSSI Min" i "RSSI Max" na wartości, zmierzone w sytuacjach minimalnego i pełnego zasięgu, które podejrzeć można w menu OSD (wchodzimy do niego przez: ustawienie drążków aparatury THR na środku, YAW w prawo, ELV do góry), gdzie można podejrzeć bieżącą wartość nieprzetworzoną - RAW.
Rezultat na Naze32 Acro (czyli bez baro, kompasu i GPSa):
Zalety poza oczywistymi pt. napięcie na pakiecie i RSSI:
- OSD można przełączyć w tryb "SMART" z aparatury (w którym ukrywane dane jak nie przekraczają wartości alarmowych),
- OSD ciągnie dane z FC, więc to co ma do dyspozycji Naze32/Flip32 można pokazać na ekranie,
- OSD jak i PIDy w Naze32/Flip32 można z aparatury na polu konfigurować.
- cena,
Wady:
- mam wrażenie jakby pogorszył mi się się zasięg video (co widać na filmie powyżej), ale nie wiem czy to kwestia OSD (zakłóceń przenoszonych z BECowego 5V na Naze32), pogody, czy zmasakrowanej anteny na nadajniku video.. (wszelkie sugestie mile widziane

).
EDYCJA:
Wygląda na to, że problemy były z zasięgiem nie miały nic wspólnego z OSD - były spowodowane przez anteny, który uległy "zużyciu" po wielu kretach
Efekt po wymianie anteny:















 Ale lepiej dwa razy, niż w ogóle
Ale lepiej dwa razy, niż w ogóle 
