
aikus pisze:...
Wiec dzis przekartkowalem ten wątek i widze, ze z heliki to przy tym pikus.

Artja pisze:aikus pisze:...
Wiec dzis przekartkowalem ten wątek i widze, ze z heliki to przy tym pikus.
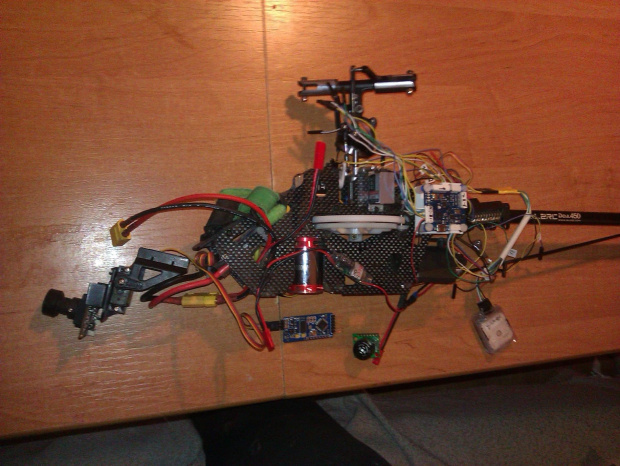
Bo ja wiem...?To samo co ma Kenobi plus kilka dodatków na 450'tce, wersja v.3 okablowania, może do weekendu się wyrobię żeby skończyć


Użytkownicy przeglądający to forum: Obecnie na forum nie ma żadnego zarejestrowanego użytkownika i 1 gość
