Jest to ciąg dalszy materiałów "Tricopter FPV od A do Z... - cz. I"SPIS TREŚCI:
CZĘŚĆ II
6. Montaż /modyfikacja wyposażenia
- wieżyczka GPS + kompas
- przeprogramowanie regli na soft SimonK FastPWM
W planie:7. Konfiguracja FC
8. Konfiguracja nadajnika
- Wyważanie silników i śmigieł
- Oblot modelu

- FPV - co kupić?
- FPV - instalacja
- FPV - oblot modelu
- FPV - zbijanie bąków z gogglami w fotelu latając nad morzem

- ...
- WIEŻYCZKA GPS + KOMPASModuł GPS pozwala na określenie z dokładnością do 5-10-ciu metrów naszą pozycję. Dzięki temu FC może określić miejsce startu i gdzie ma wrócić w przypadku zakłócenia łączności (funkcja RTH - Return To Home), lub zawisnąć w miejscu gdy mu wydamy takie polecenie z nadajnika. Dodanie kompasu zwiększa ogólnie precyzję sterowania i nawigacji. Istnieje tez możliwość lotu po punktach nawigacyjnych wprowadzonych przed lotem np. z mapy Google.
W modelu jest jednak sporo przewodów zasilających, które generują zakłócenia. Jeżeli chcemy korzystać z dobrodziejstw GPS-a i kompasu musimy odsunąć moduły na tyle daleko, żeby mogły pracować poza ich wpływem. Jako że praktycznie każdy model jest inny często pozostaje eksperymentować. Jedną ze sprawdzonych metod jest zamocowanie czujników na wieżyczce nad modelem.
Moim dodatkowym warunkiem było wykonanie masztu składanego do transportu. Inaczej pozostaje tylko obszerny samochód.
Mój pomysł to maszt typu rurka w rurkę z przewodami wewnątrz, gdzie możemy w dowolnej chwili wysunąć wieżyczkę z mocowania a zarazem nie grozi nam samoczynne jej złożenie w locie. Poza tym rurki te są bardzo lekkie, wytrzymałe i dają się lutować
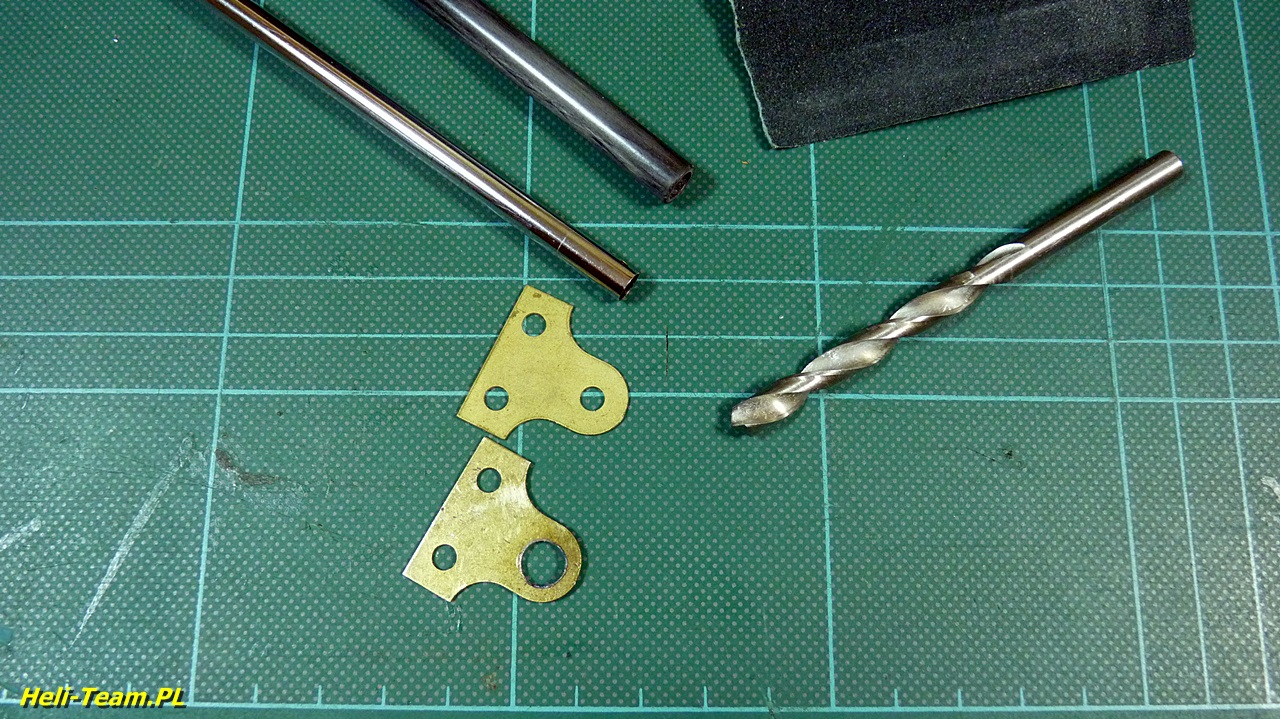
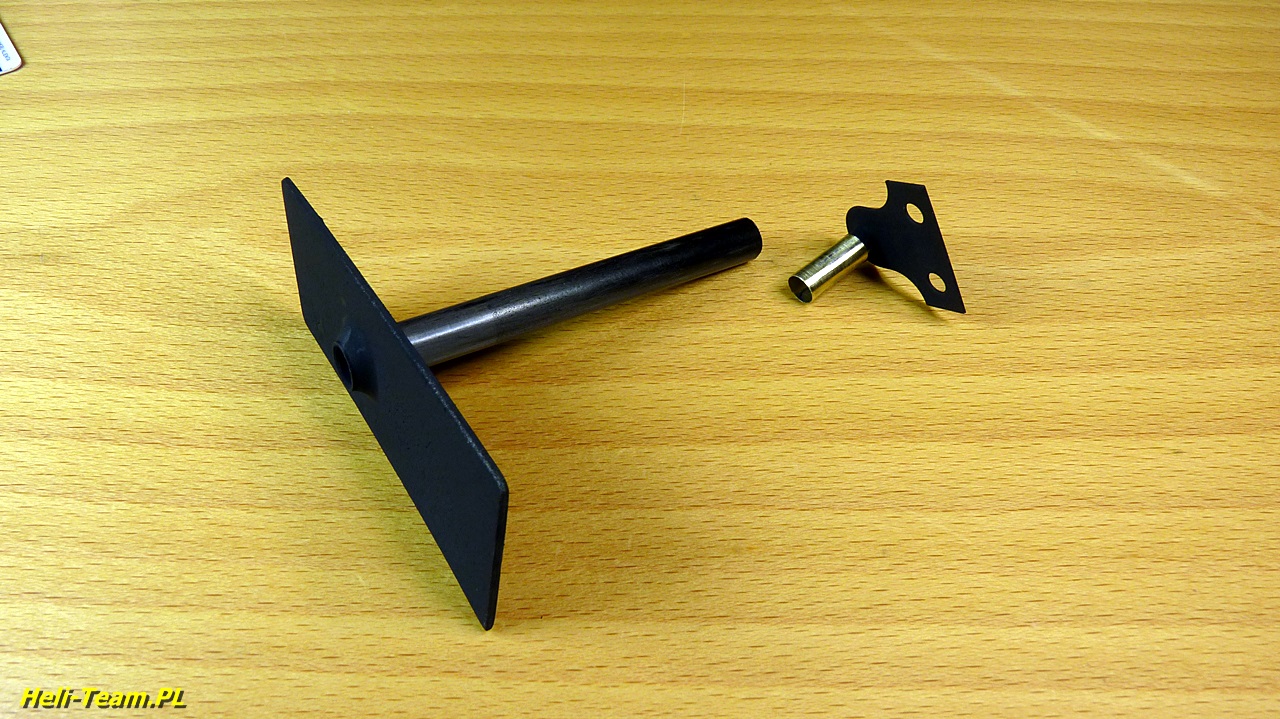
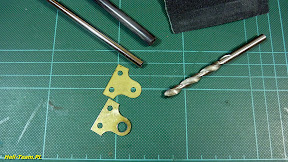
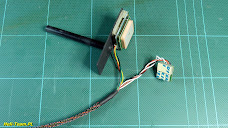
Zaczynamy od dobrania rurki masztu (u mnie akurat węglowa) i trochę mniejszej do bazy mocującej. W tym celu rozebrałem starą antenę teleskopową od radia. Węglowa ma średnicę 8 mm, ale nie jest to jakaś norma. Kierowałem się ilością przewodów - po cztery od GPS-u i kompasu.
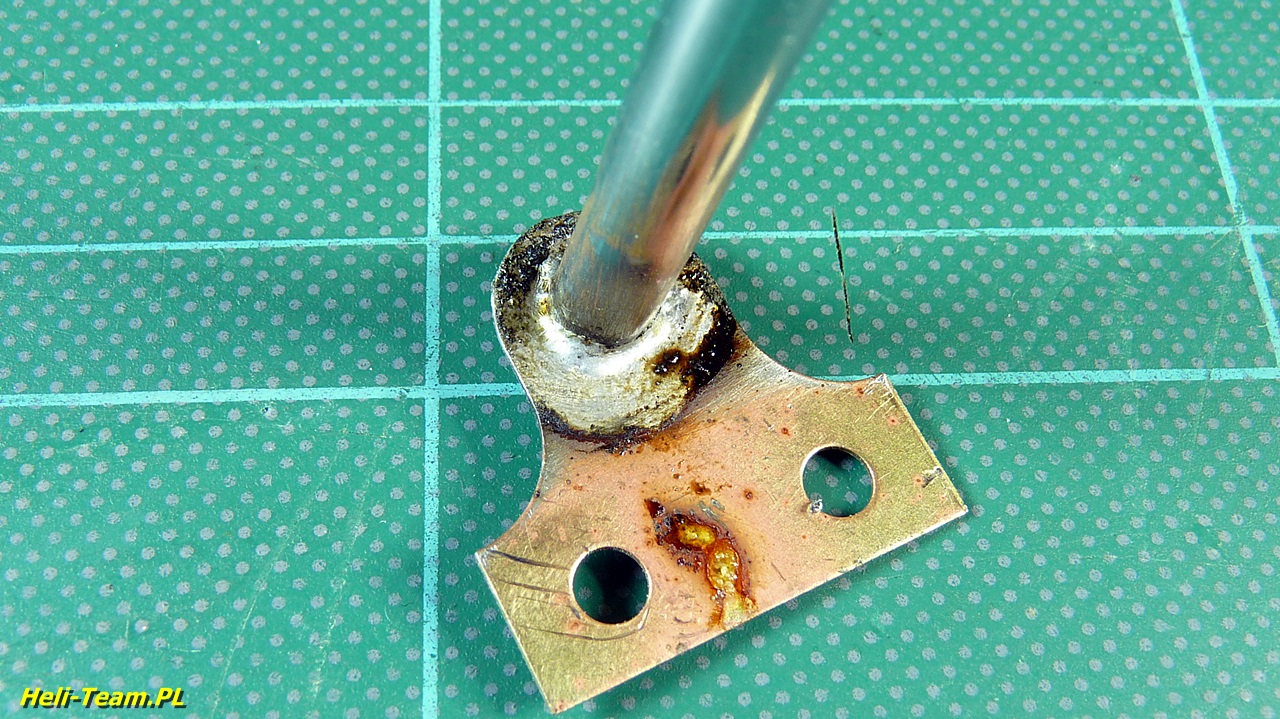
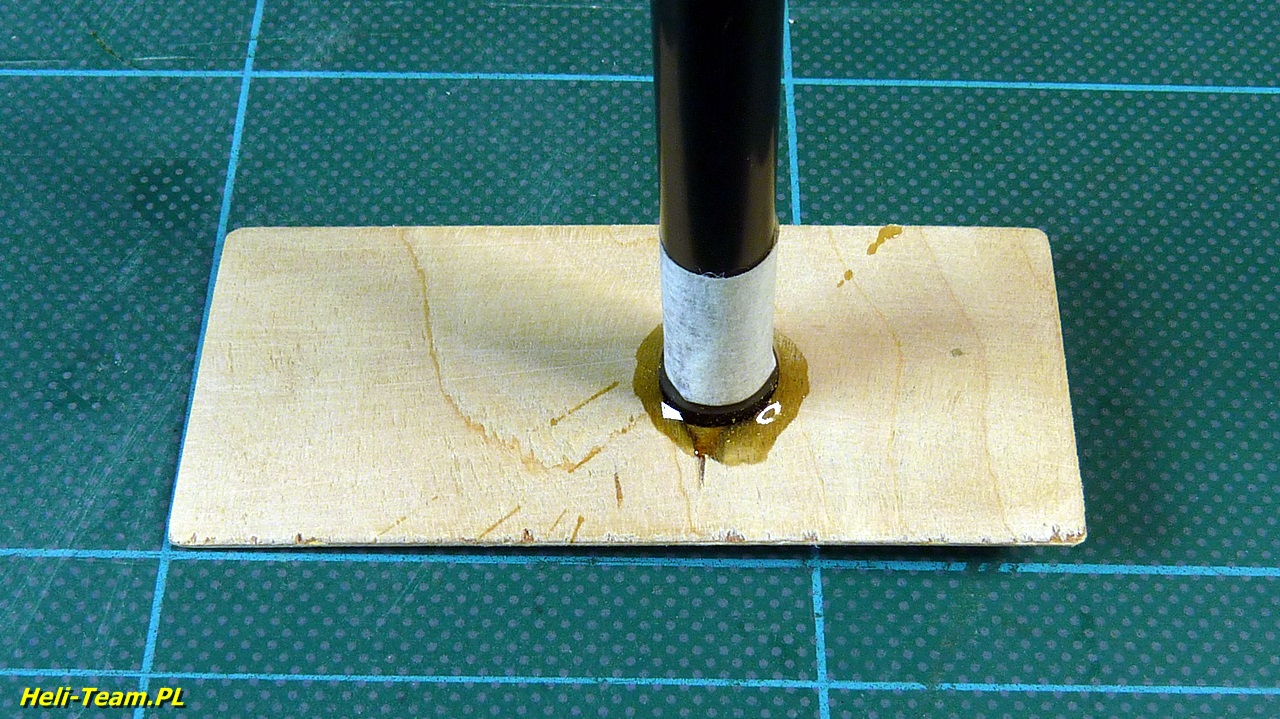
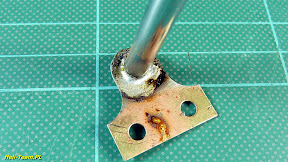
Do mocowania wykorzystałem to, co znalazłem w skrzynce narzędziowej - mosiężną zawieszkę do obrazów. Po rozwierceniu otworu do średnicy rurki zlutowałem bazę dla masztu lutownicą 40W.



Po oczyszczeniu maskujemy taśmą miejsce nasuwania masztu i malujemy sprayem. Całość wygląda całkiem nieźle:



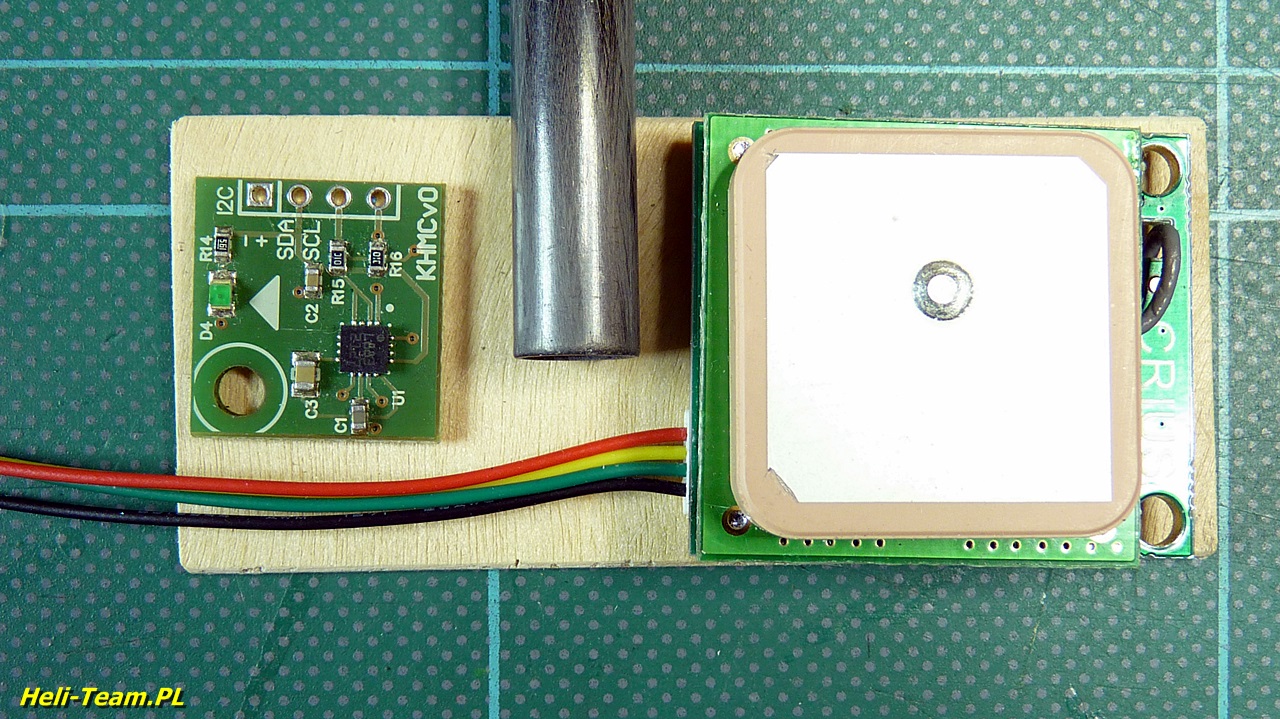
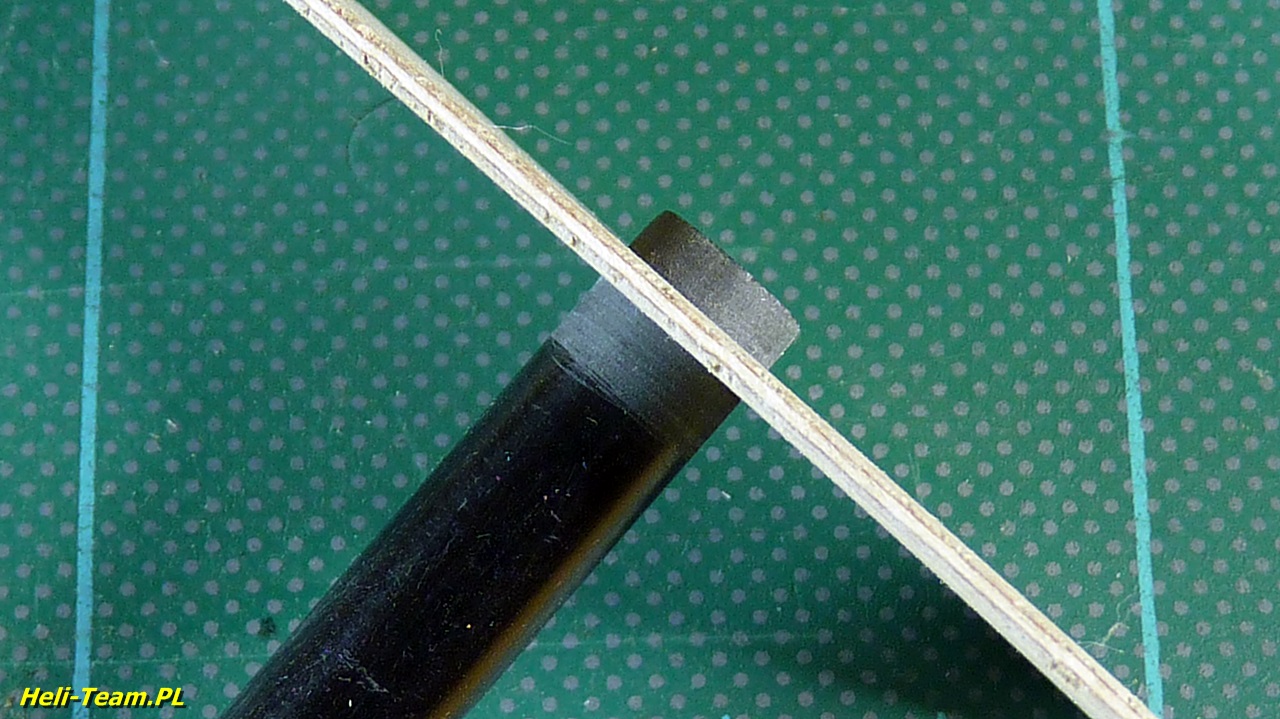
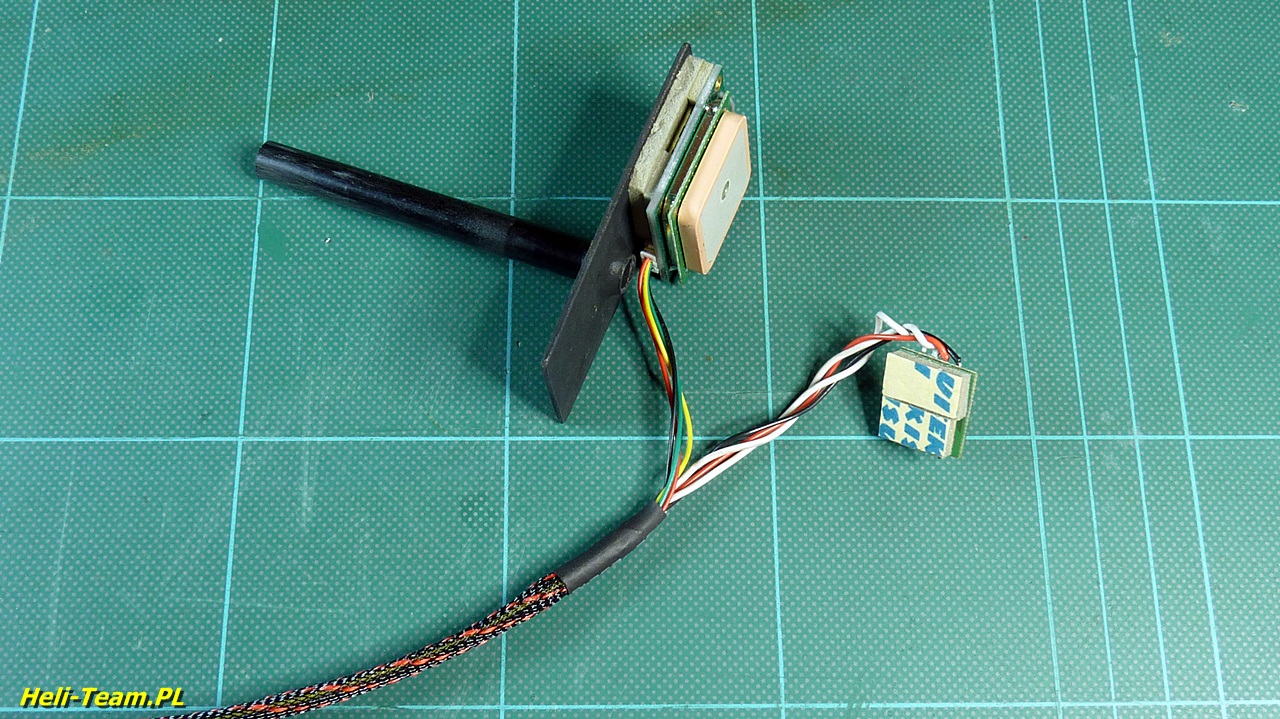
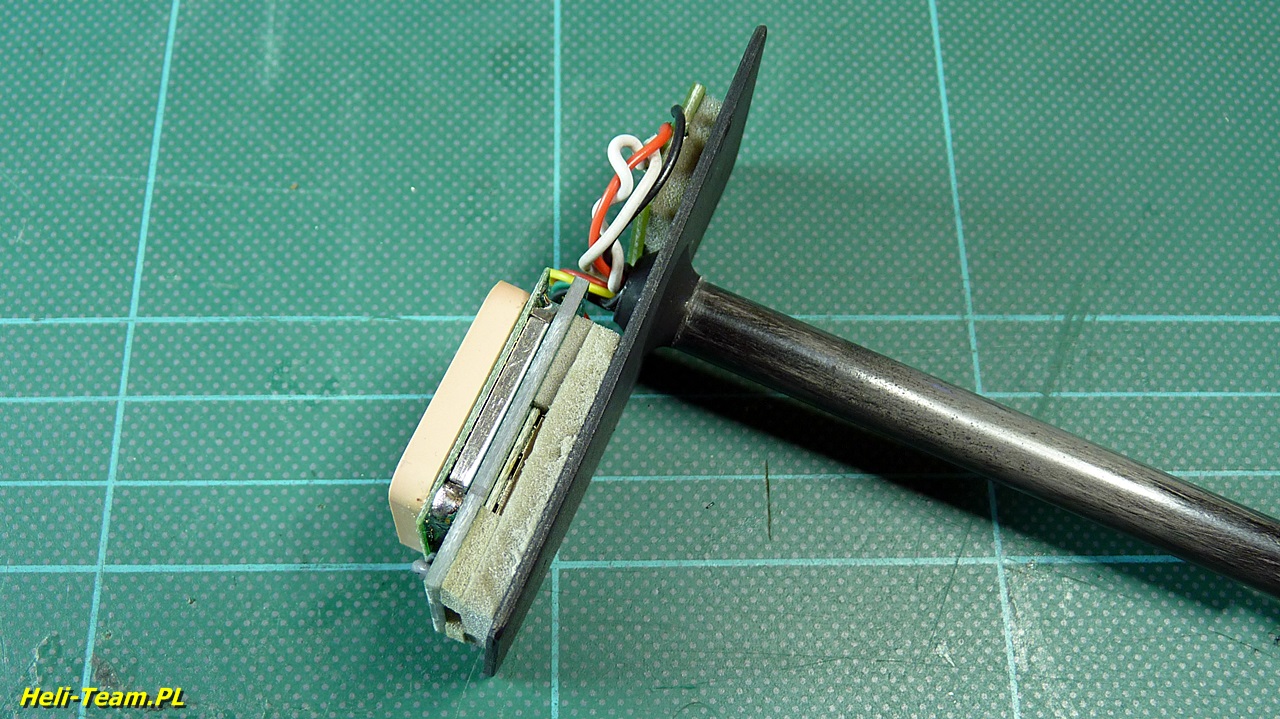
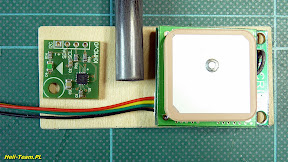
Do zamocowania czujników będzie służyła półka ze sklejki 30x70 mm. Rozmieszczamy elementy i dobieramy miejsce wykonania otworu. Zwróćcie uwagę na pierwszą fotkę - na płytce kompasu mamy trójkątne oznaczenie przodu modelu. Po wywierceniu otworu całość szlifujemy papierem i sklejamy żywicą epoksydową, która zapewni dużą wytrzymałość przy małej powierzchni styku.



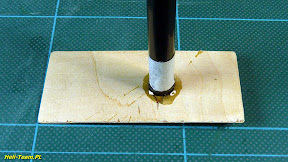
Po pomalowaniu półeczki sprayem sprawdzamy poprawność działania i możemy przystąpić do montażu podstawy do modelu w miejscu oddalonym od regulatorów i zasilania.



Kolej na montaż czujników na półeczce. Do tego wykorzystałem gąbki od żyroskopu, ale można użyć dowolnej dwustronnej. Podczas montażu zwróćmy uwagę na oznaczenia przodu modelu.


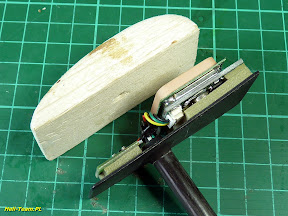
Ponieważ latam tuż nad kanałem La Manche gdzie pogoda potrafi się zmienić diametralnie i szybko, od początku myślałem jak osłonić odkrytą elektronikę na wieżyczce. Poza tym wygląda to estetyczniej i chroni trochę delikatne elementy. Wykonałem najpierw odpowiednie kopyto z klocka balsowego.
Próbowałem z butelką PET, ale ostatecznie wybrałem folię termokurczliwą do pakietów obkurczaną na kopycie hot gunem lub suszarką do włosów. Ponieważ nie miałem czarnej użyłem transparentną, którą po rozcięciu pomalowałem od środka czarnym sprayem.



To co widzicie na fotkach to prototyp

. Kolejna wersja będzie już ładniejsza. Gotową osłonkę przykleiłem gotową taśmą izolacyjną.

W momencie pisania tego odcinka jestem właśnie po lotach z tą wieżyczką. Wszystko sprawdziło się w 101% i spełniło swoje zadanie. GPS łapał po paru sek. 10 satelitów, lokalizacja czujników na wieżyczce dała płynną i niezakłóconą pracę.
- PRZEPROGRAMOWANIE REGLI NA SOFT SIMONK FASTPWMKoptery - oprócz tri - są sterowane tylko za pomocą zmiany obrotów śmigieł. Od początku użytkownicy typowych regulatorów zauważyli ociężałość modeli w reakcji na drążek gazu. Inni poszli dalej - przerobili oprogramowanie znajdujące się w chipie regulatora tak, aby zwiększyć jego częstotliwość pracy, co dało w efekcie szybszą reakcję.
Zanim omówimy całą procedurę powiem tak - po pierwsze warto, a nawet bardzo warto to zrobić. Po drugie robimy to TYLKO dla multicopterów. Nie przerabiamy regulatorów dla heli, samolotów, łódek czy aut ponieważ wymiana softu oprócz znacznego przyspieszenia reakcji silnika na gaz powoduje zniesienie pewnych celowych ograniczeń i zabezpieczeń. Można sobie po prostu narobić krzywdy. Owszem, doświadczeni w branży będą też latać na tym sofcie ale w zasadzie jego wymiana tylko w kopterach ma jakiś sens. Poza nie daje żadnych zysków.
...
Wkrótce ciąg dalszy...