Plan był aby wsadzić możliwie co najlepsze, czyli procesor F4, regulatory z obsługą DSHOT, Silniki z większym momentem obrotowym czyli zamiast 2205 jest 2206
I taki zestaw powstał:
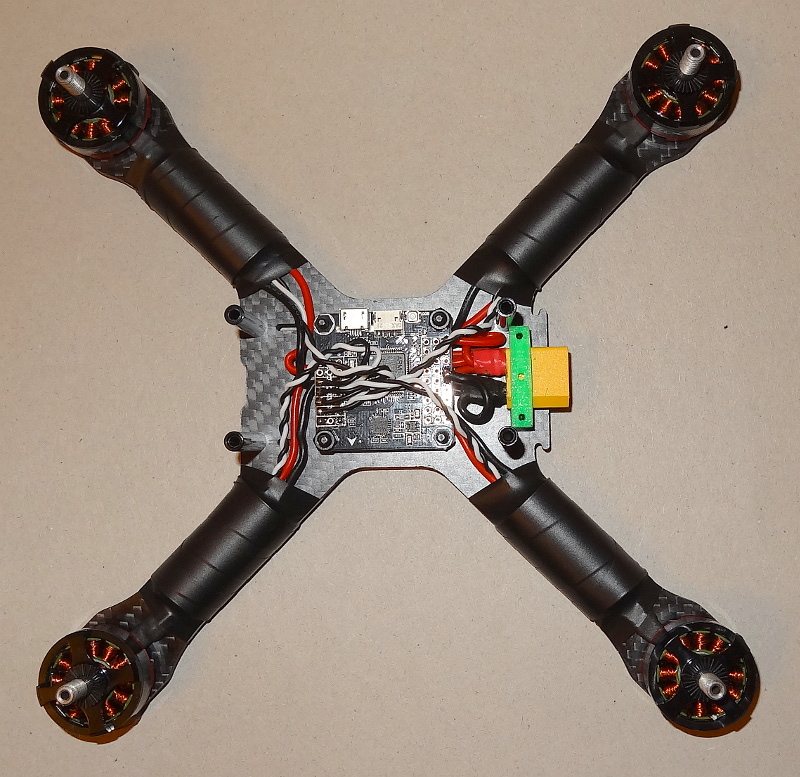
Rama X210 Unibody 4mm, a dokładnie 4,5mm
Kontroler F4 Tani i bardzo fajny kontroler, ma wbudowany stabilizator, sterowanie silnika jest na prawidłowych pinach procesora więc nie ma potrzeby przemapowywania wyjść aby obsłużyć DSHOT, ma wbudowaną pamięć do logowania lotu i rozwiązywania problemów, MPU6000 na SPI dzięki czemu możemy ustawić częstotliwość pętli PID na 8K/8K
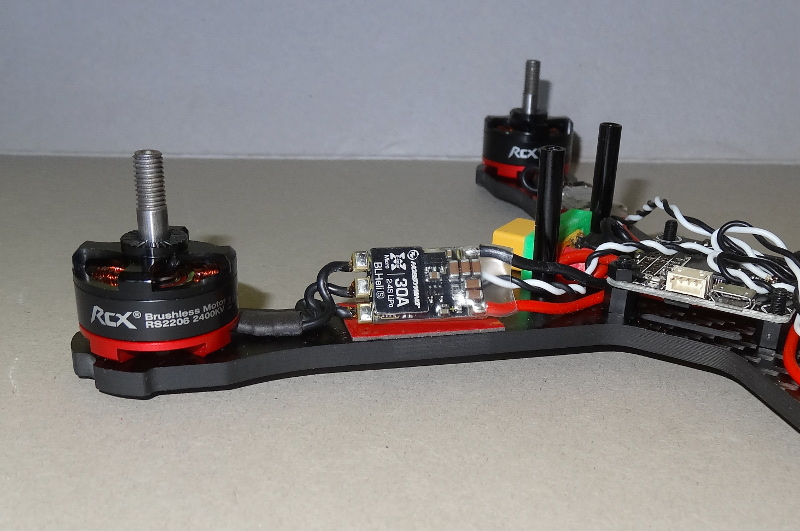
Regulatory Xrotor 30A Blheli_S Procesor BB2, obsługa najszybszych silników, bez kabli tylko 5g, peak 40A. Aby obsłużyć DSHOT600 trzeba usunąć kondensator na wejściu kabla sygnałowego.
Silniki RCX RS2206 2400 1300g ciągu ale nie to się liczy, chodzi o moment obrotowy dzięki któremu silniki szybciej przyśpieszają i gwałtowniej hamują dzięki czemu kontrola prędkości jest jeszcze szybsza, quad bardziej trzyma się powietrza i ma mniejszy efekt propwash.

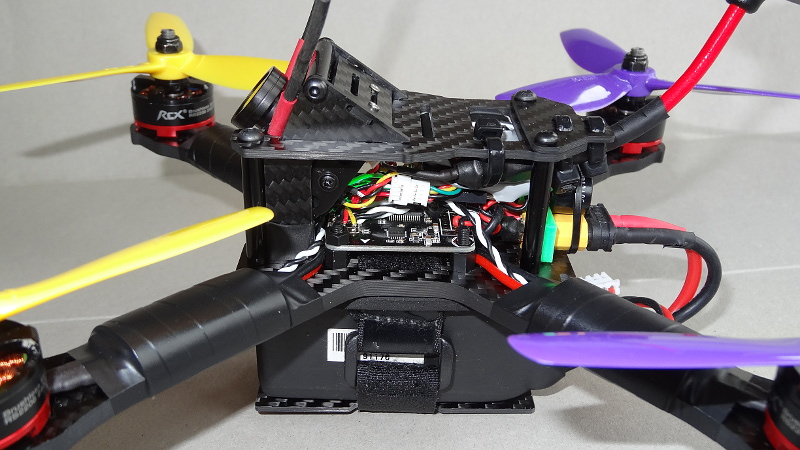
Jako że kontroler i VTX mają własne stabilizatory to zrezygnowałem z PDB dzięki temu w ciasnej ramie zrobi się w miarę luźno
Zamocowanie kamerki wymagało troszkę ewolucji.
Pozostaje jeszcze VTX i odbiornik wsadzić, beeper, założyć śmigła, troszkę zabezpieczyć i będzie można śmigać
Klasyczne moje zabezpieczenie przeciwko skalpowaniu regli przez śmigła. Wycinek z 2L coli i taśma izolacyjna.

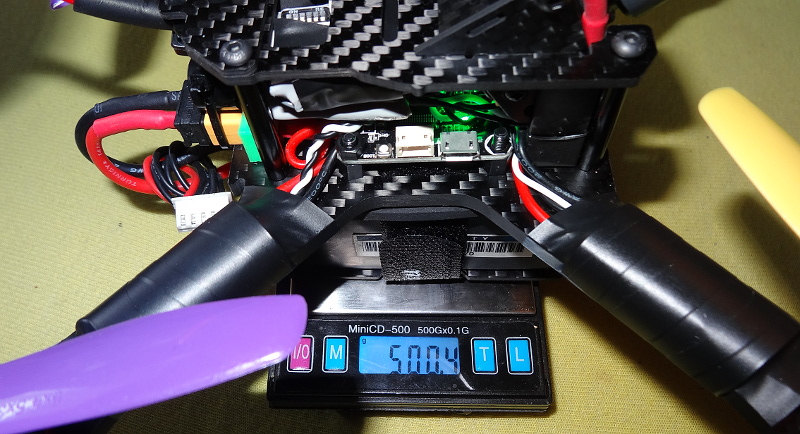
I gotowy, z pakietem równo 500g. Jak na razie po wstępnym zawisie w domu