Mini quadcopter na ramie DIY - relacja z budowy
: 1 maja 2014, o 13:48
W sumie to mam już kilka zalegających fotorelacji z budowy modeli, ale ciągle nie ma czasu... No to może na początek pokaże ostatniego nabytka - mini quada. Na razie tak z grubsza, później uzupełnie o więcej szczegółów.


No, ale po kolei:
ELEKTRONIKA:
- 2 silniki: RCX 1804 (2400KV *R) Micro Outrunner Brushless Motor (Clockwise)
- 2 silniki: RCX 1804 (2400KV) Micro Outrunner Brushless Motor (Anti-Clockwise)
- 4 regle: RCX 10A ESC Brushless Motor Speed Controller (G Series / Programed for Multicopter - SimonK Firmware)
- komplet śmigieł: 5x3" (3-Rotor) EPP5030 (*R) Counter Rotating Propellers (GM Series / CW / Black / 3pcs)
- komplet śmigieł: 5x3" (3-Rotor) EPP5030 Counter Rotating Propellers (GM Series / CCW / Black / 3pcs)
- kontroler: Hobbyking KK2.1.5 Multi-rotor LCD Flight Control Board With 6050MPU And Atmel 644PA
- rama: HobbyKing FPV250 Quad Copter A Mini Sized FPV Multi-Rotor (kit)
- pakiet: na razie testuje - na 1500mAh 3S model nadal wydaje się wyjątkowo lekki w powietrzu.
Fotki z budowy gdzieś podziałem, chociaz niewiele jest do pokazania, bo cała konstrukcja jest banalnie prosta i intuicyjna.
PIERWSZE WRAŻENIA:
1. Silniki i regle: Moc jest z nimi Rewelka. Kręcą się bardzo ładnie, praktycznie zero wibracji. Do tego model zachowuje się bardzo czysto, ale za razem lata dynamicznie a swojej wagi praktycznie nie czuje.
Rewelka. Kręcą się bardzo ładnie, praktycznie zero wibracji. Do tego model zachowuje się bardzo czysto, ale za razem lata dynamicznie a swojej wagi praktycznie nie czuje.
2. Śmigła: Kruche, ale tanie i ładnie chodzą. W tym zestawie nie zmieniałbym bo nie mam pomysłu na lepsze rozwiązanie.
3. Kontroler: Bardzo ładnie trzyma. Zero wibracji, również w trybie stabilizacji. Prosty (żeby nie powiedzieć banalny), ale bardzo dobrze pełni swoją funkcję. Jesli ktoś nie planuje latać FPV to taki akuracik do wygibasów. Wcześniej latałem na wersji 2.1 (nie 2.1.5), na której tryb stabilizacji charakteryzował się dość nieprzyjemnyM zachowaniem modelu (drgania, szarpnięcia i takie taM). Tutaj tego nie czuć wcale. Ale ciężko jednoznacznie stwierdzić czy wynika to z poprawy kontrolera, czy z tego, że tamtem latał na większym quadzie... na zupełnie innej elektronice, śmigłach itd...
4. Pakiet: Model jest w fazie testów. Na razie miał kilka lotów na 1500mAh 3S, ale duży zapas ciągu i dynamika lotu świadczą, że chętnie zabierze ze sobą coś większego (testy niebawem)
5.Rama: No właśnie. Tutaj moje odczucia są mieszane. Jej zaletą jest wytrzymałość (kawał z niej kloca) i bezpieczna klatka dla kontrolera. Najwiekszą wadą jest natomiast waga (110 gram). Co prawda model tego nie czuje, ale wolałbym mimo wszystko coś z niej zdjąć i przełożyć do pakietu. Zawsze troche więcej latania... Do tego (na co nie spojrzałem przy zakupie) rozstaw na śrubki dopasowany jest do większych silników. Ja zamontowałem na trytki - tak na szybcika, ale nie traktuje tego jako rozwiązanie docelowe.
W locie wygląda to mniej więcej tak (choć ciężko mówić o ciekawym lataniu po garażu )
Próbny lot Pawła:
Pierwsze próby wytrzymałości
Pomimo upadku na twarde uszkodziło się jedynie śmigiełko. Resztę załatwił pilot w kolejnej próbie
Byłem ciekawy jak zachowuje się kopter, gdy na jednym silniku w 3-łopatowym śmigłe pozostały 2 łopatki
Wyglądało efektownie, ale w rzeczywistości wyrwała się tylko trytka trzymająca silnik. Minuta naprawy i działał dalej
To na razie tyle. Niebawem trochę testów z obciążeniem, pakietami i moze filmy z pokładu.
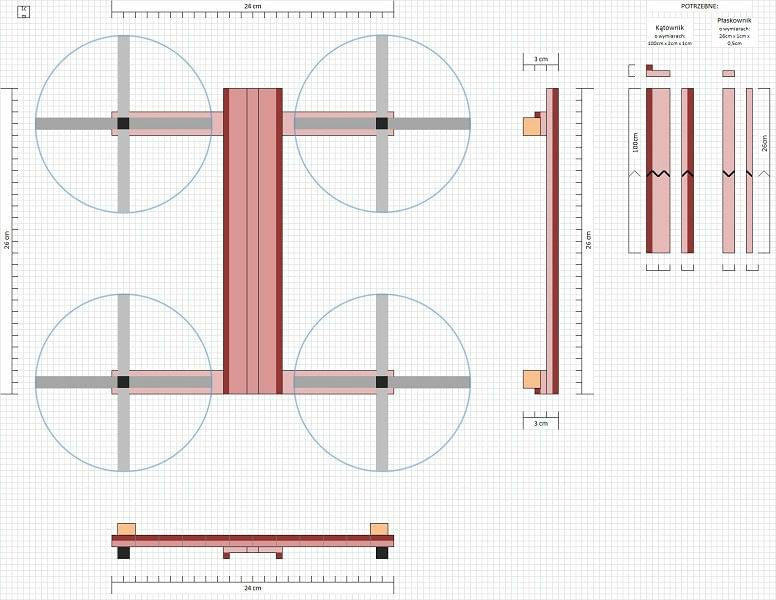
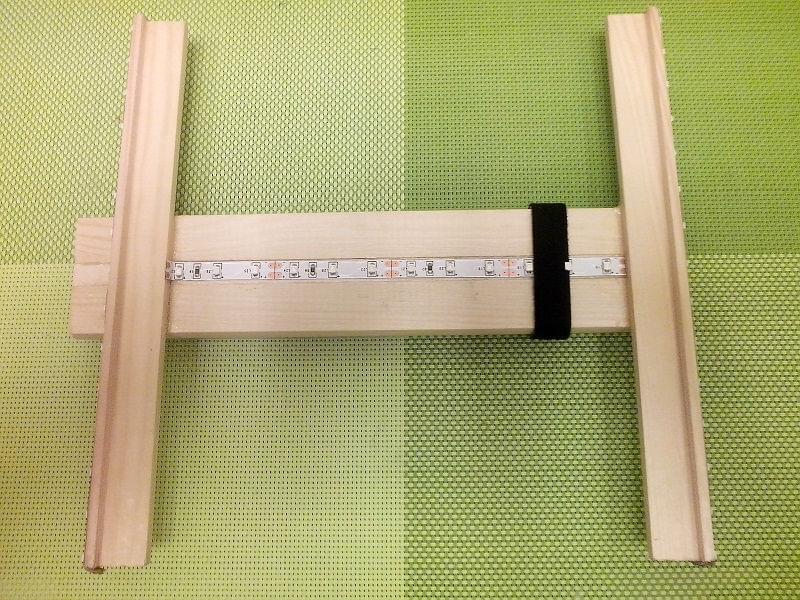
Dodatkowo obmyślam własnie nowa ramę DIY, bo ta obecna jakoś mi nie leży.
No, ale po kolei:
ELEKTRONIKA:
- 2 silniki: RCX 1804 (2400KV *R) Micro Outrunner Brushless Motor (Clockwise)
- 2 silniki: RCX 1804 (2400KV) Micro Outrunner Brushless Motor (Anti-Clockwise)
- 4 regle: RCX 10A ESC Brushless Motor Speed Controller (G Series / Programed for Multicopter - SimonK Firmware)
- komplet śmigieł: 5x3" (3-Rotor) EPP5030 (*R) Counter Rotating Propellers (GM Series / CW / Black / 3pcs)
- komplet śmigieł: 5x3" (3-Rotor) EPP5030 Counter Rotating Propellers (GM Series / CCW / Black / 3pcs)
- kontroler: Hobbyking KK2.1.5 Multi-rotor LCD Flight Control Board With 6050MPU And Atmel 644PA
- rama: HobbyKing FPV250 Quad Copter A Mini Sized FPV Multi-Rotor (kit)
- pakiet: na razie testuje - na 1500mAh 3S model nadal wydaje się wyjątkowo lekki w powietrzu.
Fotki z budowy gdzieś podziałem, chociaz niewiele jest do pokazania, bo cała konstrukcja jest banalnie prosta i intuicyjna.
PIERWSZE WRAŻENIA:
1. Silniki i regle: Moc jest z nimi
2. Śmigła: Kruche, ale tanie i ładnie chodzą. W tym zestawie nie zmieniałbym bo nie mam pomysłu na lepsze rozwiązanie.
3. Kontroler: Bardzo ładnie trzyma. Zero wibracji, również w trybie stabilizacji. Prosty (żeby nie powiedzieć banalny), ale bardzo dobrze pełni swoją funkcję. Jesli ktoś nie planuje latać FPV to taki akuracik do wygibasów. Wcześniej latałem na wersji 2.1 (nie 2.1.5), na której tryb stabilizacji charakteryzował się dość nieprzyjemnyM zachowaniem modelu (drgania, szarpnięcia i takie taM). Tutaj tego nie czuć wcale. Ale ciężko jednoznacznie stwierdzić czy wynika to z poprawy kontrolera, czy z tego, że tamtem latał na większym quadzie... na zupełnie innej elektronice, śmigłach itd...
4. Pakiet: Model jest w fazie testów. Na razie miał kilka lotów na 1500mAh 3S, ale duży zapas ciągu i dynamika lotu świadczą, że chętnie zabierze ze sobą coś większego (testy niebawem)
5.Rama: No właśnie. Tutaj moje odczucia są mieszane. Jej zaletą jest wytrzymałość (kawał z niej kloca) i bezpieczna klatka dla kontrolera. Najwiekszą wadą jest natomiast waga (110 gram). Co prawda model tego nie czuje, ale wolałbym mimo wszystko coś z niej zdjąć i przełożyć do pakietu. Zawsze troche więcej latania... Do tego (na co nie spojrzałem przy zakupie) rozstaw na śrubki dopasowany jest do większych silników. Ja zamontowałem na trytki - tak na szybcika, ale nie traktuje tego jako rozwiązanie docelowe.
W locie wygląda to mniej więcej tak (choć ciężko mówić o ciekawym lataniu po garażu
Próbny lot Pawła:
Pierwsze próby wytrzymałości
Pomimo upadku na twarde uszkodziło się jedynie śmigiełko. Resztę załatwił pilot w kolejnej próbie
Byłem ciekawy jak zachowuje się kopter, gdy na jednym silniku w 3-łopatowym śmigłe pozostały 2 łopatki
Wyglądało efektownie, ale w rzeczywistości wyrwała się tylko trytka trzymająca silnik. Minuta naprawy i działał dalej
To na razie tyle. Niebawem trochę testów z obciążeniem, pakietami i moze filmy z pokładu.
Dodatkowo obmyślam własnie nowa ramę DIY, bo ta obecna jakoś mi nie leży.