


Kenobi36 pisze:Może spróbuj aktywowanie przypisać do kanału zamiast z drąga.
Kenobi36 pisze:Podczas aktywowania gaz musi być na minimum (u mnie ok 1010)
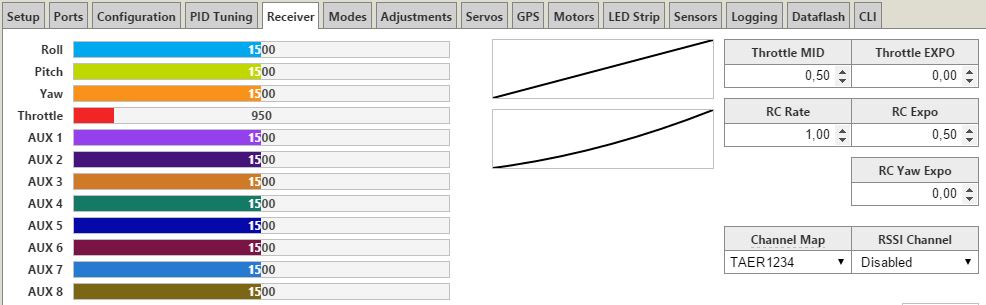
Oczywiście przypadku aktywacji z drąga YAW też musi być bardzo duże (1010 lub 1990 nie pamiętam), najlepiej sprawdzić to w zakładce receiver.
Kenobi36 pisze:Powiedz też jakie masz sekwencje ledów, od momentu podłączenia zasilania. Może płytka się nie inicjalizuje.
VaderJK pisze:Kenobi to są pidy Twoje z najnowszych lotów?
Kod: Zaznacz cały
Entering CLI Mode, type 'exit' to return, or 'help'
# set
Current settings:
looptime = 3500
emf_avoidance = 0
mid_rc = 1500
min_check = 1100
max_check = 1900
rssi_channel = 0
rssi_scale = 30
rssi_ppm_invert = 0
rc_smoothing = 1
input_filtering_mode = 0
min_throttle = 1000
max_throttle = 2000
min_command = 1000
servo_center_pulse = 1500
3d_deadband_low = 1406
3d_deadband_high = 1514
3d_neutral = 1460
3d_deadband_throttle = 50
motor_pwm_rate = 400
servo_pwm_rate = 50
retarded_arm = 0
disarm_kill_switch = 0
auto_disarm_delay = 5
small_angle = 25
fixedwing_althold_dir = 1
reboot_character = 82
gps_provider = 0
gps_sbas_mode = 0
gps_auto_config = 1
gps_auto_baud = 0
gps_pos_p = 15
gps_pos_i = 0
gps_pos_d = 0
gps_posr_p = 34
gps_posr_i = 14
gps_posr_d = 53
gps_nav_p = 25
gps_nav_i = 33
gps_nav_d = 83
gps_wp_radius = 200
nav_controls_heading = 1
nav_speed_min = 100
nav_speed_max = 300
nav_slew_rate = 30
serialrx_provider = 0
spektrum_sat_bind = 0
telemetry_switch = 0
telemetry_inversion = 0
frsky_default_lattitude = 0.000
frsky_default_longitude = 0.000
frsky_coordinates_format = 0
frsky_unit = 0
frsky_vfas_precision = 0
hott_alarm_sound_interval = 5
battery_capacity = 0
vbat_scale = 110
vbat_max_cell_voltage = 43
vbat_min_cell_voltage = 33
vbat_warning_cell_voltage = 35
current_meter_scale = 400
current_meter_offset = 0
multiwii_current_meter_output = 0
current_meter_type = 1
align_gyro = 0
align_acc = 0
align_mag = 0
align_board_roll = 0
align_board_pitch = 0
align_board_yaw = 0
max_angle_inclination = 500
gyro_lpf = 42
moron_threshold = 32
gyro_cmpf_factor = 600
gyro_cmpfm_factor = 250
alt_hold_deadband = 40
alt_hold_fast_change = 1
deadband = 0
yaw_deadband = 0
throttle_correction_value = 0
throttle_correction_angle = 800
yaw_control_direction = 1
pid_at_min_throttle = 1
yaw_motor_direction = 1
yaw_jump_prevention_limit = 200
tri_unarmed_servo = 1
servo_lowpass_freq = 400
servo_lowpass_enable = 0
default_rate_profile = 0
rc_rate = 90
rc_expo = 65
rc_yaw_expo = 0
thr_mid = 50
thr_expo = 0
roll_rate = 0
pitch_rate = 0
yaw_rate = 0
tpa_rate = 0
tpa_breakpoint = 1500
failsafe_delay = 10
failsafe_off_delay = 200
failsafe_throttle = 995
failsafe_kill_switch = 0
failsafe_throttle_low_delay = 100
rx_min_usec = 885
rx_max_usec = 2115
gimbal_mode = 0
acc_hardware = 0
acc_lpf_factor = 4
accxy_deadband = 40
accz_deadband = 40
accz_lpf_cutoff = 5.000
acc_unarmedcal = 1
acc_trim_pitch = 0
acc_trim_roll = 0
baro_tab_size = 21
baro_noise_lpf = 0.600
baro_cf_vel = 0.985
baro_cf_alt = 0.965
baro_hardware = 0
mag_hardware = 0
mag_declination = 0
pid_controller = 1
p_pitch = 40
i_pitch = 30
d_pitch = 23
p_roll = 40
i_roll = 30
d_roll = 23
p_yaw = 85
i_yaw = 45
d_yaw = 0
p_pitchf = 1.500
i_pitchf = 0.400
d_pitchf = 0.030
p_rollf = 1.500
i_rollf = 0.400
d_rollf = 0.030
p_yawf = 2.500
i_yawf = 1.000
d_yawf = 0.000
level_horizon = 3.000
level_angle = 5.000
sensitivity_horizon = 75
p_alt = 50
i_alt = 0
d_alt = 0
p_level = 90
i_level = 10
d_level = 100
p_vel = 120
i_vel = 45
d_vel = 1
yaw_p_limit = 500
dterm_cut_hz = 0
pterm_cut_hz = 0
gyro_cut_hz = 0
blackbox_rate_num = 1
blackbox_rate_denom = 1
blackbox_device = 0
magzero_x = 0
magzero_y = 0
magzero_z = 0
# 



Kenobi36 pisze:W sumie chyba nie padła jedna z najlepszych rad
Zresetuj i ustaw od początku

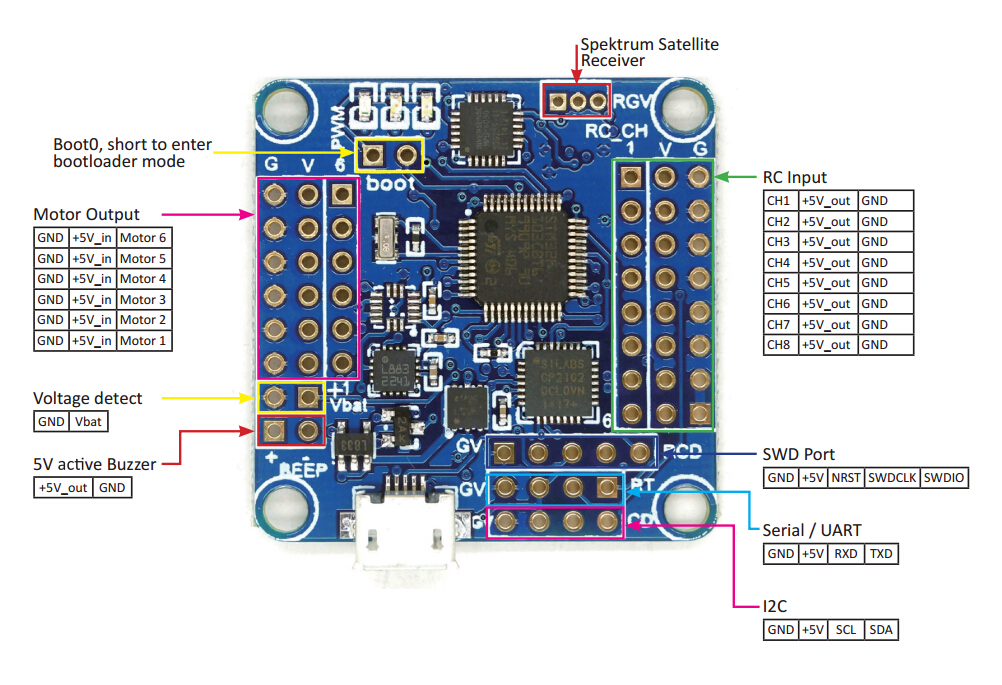
cebulator pisze:Buzer z generatorem na 5V podłączasz do dedykowanego portu. Obok masz wejście na pomiar napięcia tylko uwaga na polaryzacje.
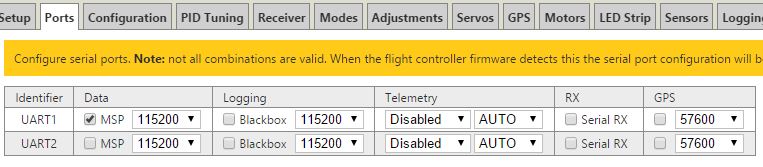
Z telemetrią na taranisa to trzeba pokombinować. W UART1 zaznaczasz w tabeli telemetry protokół frsky i w konfiguracji w następnej zakładce trzeba zaptaszkować TELEMETRY. Później tylko ustawić co ma wyświetlać taranis. Telemetria działa tylko jak naze jest uzbrojona.
U mnie telemetrią zadziałała dopiero jak do taranisa wgrałem soft 2.1 ale nie wiem czy to reguła.
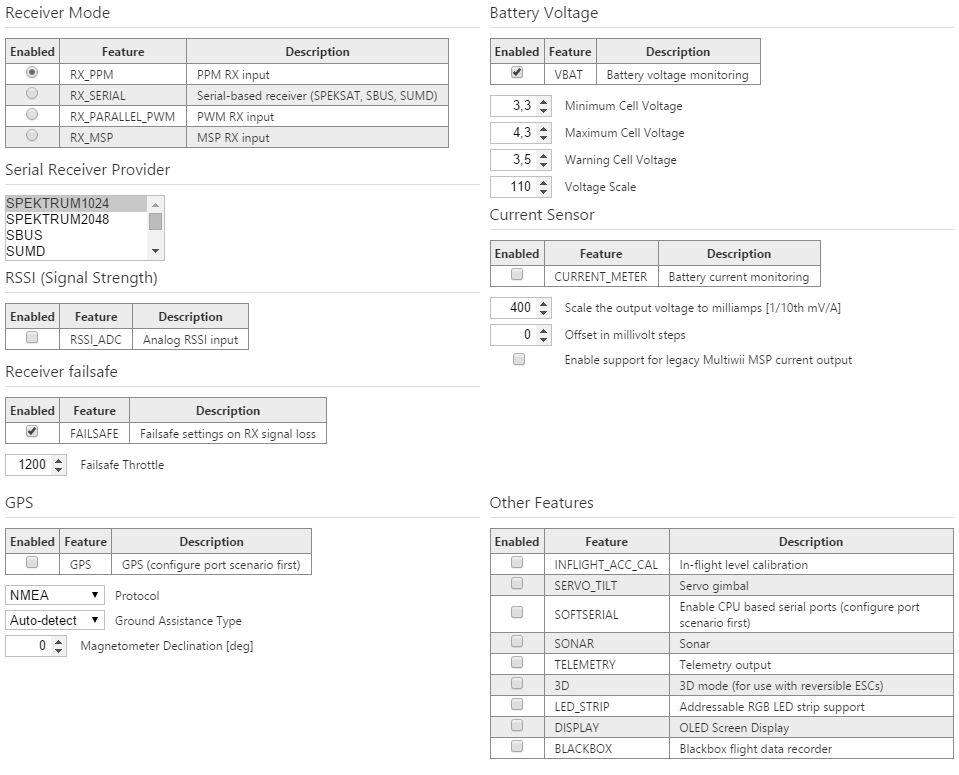
cebulator pisze:W cleanflight zaznaczasz vbat i kalibrujesz i buzer działa.
Użytkownicy przeglądający to forum: Obecnie na forum nie ma żadnego zarejestrowanego użytkownika i 2 gości

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}